Your cart is empty

Power Transmission Tutorials
Purpose-Driven Humanoids: Why Advanced Motion Components Matter
06 June, 2025
15 min read
Humanoid robots are breaking new ground in industries from manufacturing to healthcare, taking on tasks that once seemed impossible. In humanoid robotics, motion components such as high-precision linear guides and advanced bearings play a critical role in replicating human-like movements reliably. The growing adoption of humanoid robots “would not be possible without advanced motion components that allow them to perform tasks by replicating human motion”.These components provide the precision, durability, and integration capabilities needed for robots to achieve smooth, human-like motion and operate in real-world environments. This article explores how cutting-edge linear guides, crossed roller bearings, and other rotary motion components empower humanoid robots – and why partnering with experts at Pacific International Bearing Sales Inc. can make all the difference in designing a high-performance humanoid.
Humanoid Tasks Demand Precision and Stability
Humanoid robots perform various movements that mimic human motion. Each type of motion – whether a major joint rotation or a fine linear slide – requires components optimized for that task. Below, we examine a few key motion elements in humanoids and the motion components best suited for each:
Hip, Shoulder, Elbow, or Wrist Joints – Crossed Roller Bearings
There may be no more important component in humanoid robot joints than the crossed roller bearing (CRB). These bearings consist of cylindrical rollers arranged in alternating orientations (each roller is crossed at 90° relative to the next) between an inner and outer ring. This unique geometry means a single compact bearing can simultaneously support radial loads, axial loads (thrust in both directions), and moment (tilting) loads. The result is exceptional stability and rotational accuracy in a small package – exactly what high-torque humanoid joints need.
For example, in a robot’s hip or knee actuator, a crossed roller bearing handles the complex loads when the leg swings and supports weight. Because the rollers make line contact with the raceways (rather than point contact as in ball bearings), deformation under load is minimized. This gives CRBs very high rigidity and minimal play, ensuring precise, smooth joint motion even under heavy loads. A typical full-size humanoid robot might use 14–20 crossed roller bearings in its various joints (hips, shoulders, elbows, wrists, etc.) to achieve human-like articulation.
To illustrate the range of crossed roller bearings available, Table 1 compares a few IKO CRB bearings. Notably, the IKO CRBH series (High Rigidity Type Crossed Roller Bearings) provides slim bearings that are easy to integrate into joint designs. For instance, IKO CRBH208AUU is a high-rigidity crossed roller bearing with a 20 mm bore and only 8 mm width – ideal for a compact wrist or elbow joint. Larger sizes in the CRBH series can handle even higher loads for use in major axes like hips or shoulders.
| Part Number (IKO CRBH Series) | Inner Diameter × Outer Diameter × Width (mm) | Dynamic Load Rating (N) | Static Load Rating (N) | Typical Application in Humanoid Robot |
|---|---|---|---|---|
| CRBH208AUU (High Rigidity) | 20 × 36 × 8 mm | 2,910 N | 2,430 N | Compact joints (wrist, small elbow) – slim profile fits tight spaces while supporting multi-axis loads. |
| CRBH4010AUU (High Rigidity) | 40 × 65 × 10 mm | 8,610 N | 10,600 N | Medium joints (elbow, knee) – high load capacity and rigidity for mid-sized actuators. |
| CRBH7013AUU (High Rigidity) | 70 × 100 × 13 mm | 20,100 N | 27,700 N | Major joints (hip, shoulder) – handles heavy combined loads with excellent accuracy and stiffness. |
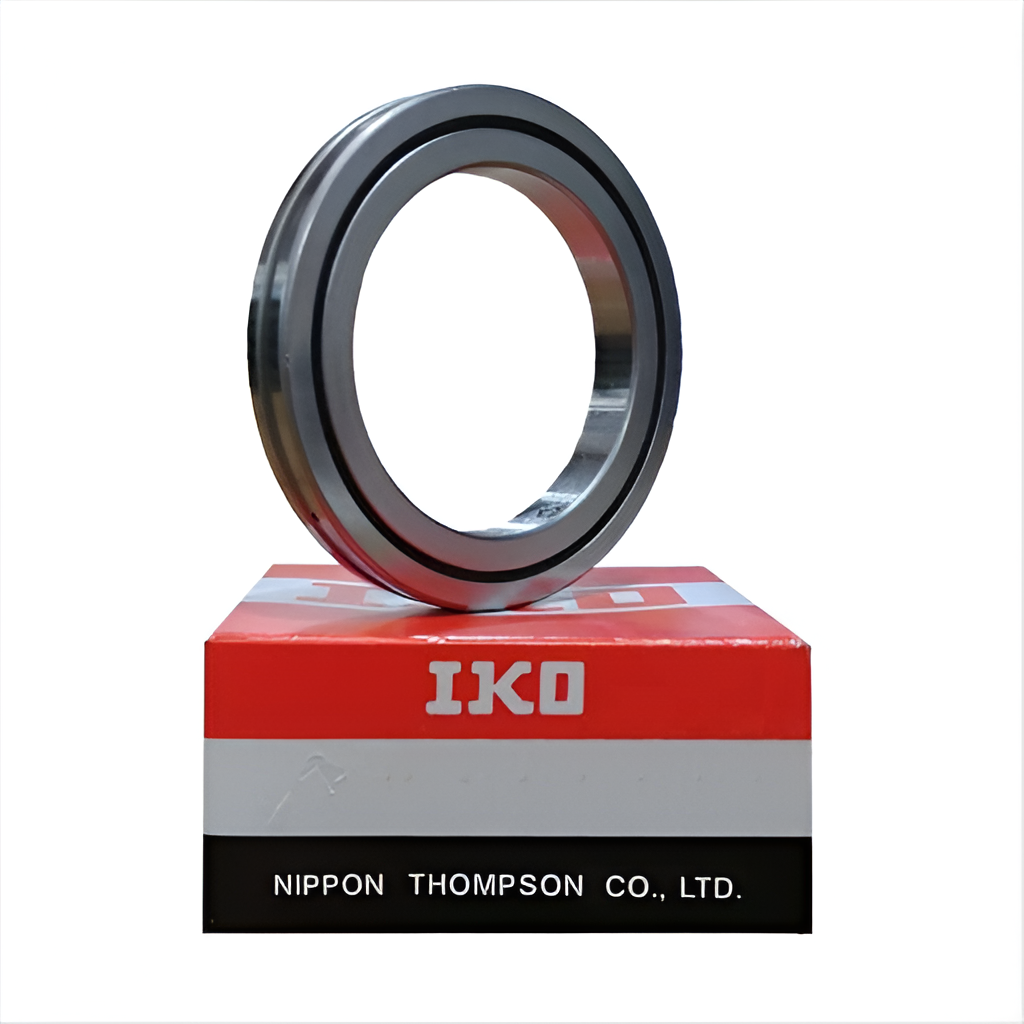
Crossed roller bearings like the above combine high load capacity, precision, and rigidity. Using these IKO crossed roller bearings in humanoid joint actuators ensures smooth rotation with minimal deflection, which is critical for balance and fine motion control. Figure: An IKO crossed roller bearing (CRBH series) provides a compact rotational joint that can support radial, axial, and moment loads simultaneously. Its robust construction is well-suited for humanoid robot hip and shoulder joints.
Linear Motion in Grippers and Limbs – Miniature Linear Guides
Not all movements in a humanoid are rotary; many are linear motions, such as the opening and closing of fingers or extending a limb. For controlled linear motion, miniature linear guides (also called linear motion rolling guides or slide rails) are ideal. These guides use circulating ball bearings or rollers running in tracks to allow smooth, precise sliding movement with minimal friction.
A common example in humanoids is the finger mechanism in robotic hands or grippers. Each “finger” often uses a tiny linear guide to slide segments, mimicking the way our fingers extend and curl. These linear guides must be extremely compact yet provide high precision and sufficient load capacity to grip objects firmly without backlash. They also need to operate smoothly to achieve the delicate touch required for handling fragile objects.
IKO’s Linear Way L and Linear Way ML series guides are well-suited here. The IKO LWL series carriages, for instance, come in very small sizes. One such model is IKO LWL9B, a miniature linear guide block that runs on a 9 mm wide rail. Despite its small size, the LWL9 B uses two rows of steel balls in four-point contact with the rail, giving it stability and accuracy under load. For slightly larger linear motions – say a sliding mechanism in an arm or the neck – a bigger model like LWL12B or LWL15B can be used, which provides higher load ratings and rigidity while still being compact. Notably, IKO’s ML Series miniature guides include built-in C-Lube lubrication technology and come in some of the industry’s smallest sizes, with track rail widths as small as 1 mm, enabling incredibly tiny linear slides for micro-motion in humanoids.
In addition to size options, linear guides can be chosen in standard or long-block versions. Longer blocks or dual-carriage arrangements increase stiffness for applications like a humanoid’s leg extension or torso slider, where a longer stroke and higher moment capacity might be needed. Linear guides can even be mounted vertically in a robot’s neck joint to allow the head to raise, lower, or tilt – useful for a humanoid to “look” above obstacles.
Linear Guide Model (IKO) | Rail Width × Height (mm) | Dynamic Load Rating (N) | Static Load Rating (N) | Medium sliders (e.g., wrist extension, neck tilt) – higher load miniature guide for slightly larger actuators. |
|---|---|---|---|---|
| LWL9B (Linear Way L) | 9 mm × 6 mm rail cross-section, 10 mm block height | 1,810 N | 2,760 N | Small sliders (e.g. finger mechanisms, small grippers) – ultra-compact guide for precise finger motion. |
| LWL12B (Linear Way L) | 12 mm × 8 mm rail cross-section, 13 mm block height | 3,330 N | 4,290 N | Medium sliders (e.g. wrist extension, neck tilt) – higher load miniature guide for slightly larger actuators. |
| LWL15B (Linear Way L) | 15 mm × 10 mm rail cross-section, 16 mm block height | 4,980 N | 6,490 N | Larger linear motion (e.g. arm extension, torso lift) – robust miniature guide for heavy-duty precision slides. |
Miniature linear guides offer smooth, controlled linear motion in a very compact form factor. The above IKO guides cover a range from tiny (9 mm width) to larger miniatures (15 mm width), accommodating different force requirements. Using linear guides for humanoid robots ensures that sliding joints like grippers operate with high accuracy and repeatability.

An IKO LWL9B miniature linear guide block (shown on its rail) is one example of a tiny linear motion component that can be used in humanoid robot fingers or other small linear axes. Despite its size, it can carry significant loads with precision.
Limb Pivot Stabilization – Spherical Plain Bearings and Cam Followers
In addition to the main joint bearings and linear slides, humanoid designs often require stabilizing links or pivots that allow limited rotation with high load support. For instance, many humanoid robots have a supporting link or rod behind the ankle or between other linkages – sometimes called a “dog-bone” linkage – to maintain structure and balance. These pivots must allow a certain range of angular motion (to accommodate misalignment or shock) while carrying the weight of the robot.
For such applications, spherical plain bearings are commonly used. A spherical plain bearing (also known as bushings or a rod-end when in a housing) features a spherical inner ring that can swivel inside a cylindrical outer ring. This design permits angular misalignment between connected parts. In a humanoid’s foot, for example, a spherical bearing at the joint where a stabilizer rod meets the foot allows the foot to tilt and rotate slightly relative to the leg, similar to how our ankles flex, without binding. Spherical plain bearings are made of robust metal-on-metal or metal-on-PTFE combinations and can support very high radial and axial loads. They are ideal for heavy static or oscillatory loads and shock absorption in pivots, albeit they operate with sliding friction (no rolling elements).
Another type of rotary bearing useful in certain humanoid linkages is the cam follower (also known as a roller follower). Cam followers are essentially heavy-duty needle roller bearings integrated into a stud or yoke that can be easily mounted to machine parts. The IKO CFE series cam followers, for example, have an eccentric stud, meaning the stud’s mounting collar is offset – this allows adjustment of the position of the roller relative to the track or cam it contacts. In humanoid robots, cam followers might be used in mechanisms that convert rotary motion to linear motion or in joints that require a rolling contact to reduce friction. For instance, a cam follower could serve as a rolling pivot at a knee or elbow linkage where a lever slides over it, or as part of a suspension or balancing mechanism in the foot. The model IKO CFE10-1UUR is a metric eccentric cam follower with a 10 mm stud diameter (M10 thread) and a 26 mm outer roller diameter. It features built-in seals (designation “UU”) and a crowned outer ring (“R” for reducing edge stress) – well-suited for handling intermittent rotation or oscillation under load. Cam followers provide lower friction than plain bushings because of the rolling needle elements, though they constrain motion to one axis (they don’t allow the multi-directional tilt that spherical bearings do).
To compare these stabilization components, Table 3 gives some specifications. Note the difference in load capacities: spherical plain bearings can support extremely high static loads due to their large contact area, whereas cam followers support high dynamic loads and offer smoother rolling motion for continuous operation.
Component Type & Example | Key Dimensions | Dynamic Load Capacity (N) | Static Load Capacity (N) | Typical Use in Humanoid Robots |
|---|---|---|---|---|
| Spherical Plain Bearing (e.g. IKO GE10 or rod-end PHS10, 10 mm bore) | 10 mm bore, steel-on-steel spherical joint | ~9,000 N (dynamic)¹ | ~50,000 N (static)¹ | Misalignment joints and link rods (e.g., ankle linkage, hip stabilization rod) – allow angular tilt and rotation under very heavy loads (excellent for absorbing shocks and maintaining alignment). |
| Cam Follower Bearing (IKO CFE10-1UUR, eccentric stud type) | 26 mm roller OD on 10 mm stud (M10×1.25 thread) | 5,430 N (dynamic) | 6,890 N (static) | Rolling pivot or track follower (e.g., knee lever roller, adjustable support joint) – provides a low-friction rotation point for one-axis motion, with a stud for easy mounting in compact mechanisms. |
Note: Spherical plain bearing load ratings are very high in static scenarios (supporting weight with limited motion). The approximate values above illustrate a typical 10 mm bore spherical joint’s capacity. In practice, dynamic oscillating loads for spherical bearings are limited by lubrication and wear considerations. Always consult detailed catalogs for precise values.

An IKO eccentric cam follower (CFE series) provides a robust rotary bearing with an integrated stud. Cam followers like this can serve as adjustable pivot points or rolling supports in humanoid linkages, complementing spherical plain bearings in applications where rotation is primarily in one plane.
Understand the Operating Environment and Requirements
While selecting the right bearing or guide is essential, it’s equally important to consider the robot’s operating conditions early in the design. Humanoids may be deployed in environments too hazardous or demanding for humans, such as disaster areas, outdoors in varying weather, or in industrial settings with dust or chemicals. Each motion component should be chosen not only for load and size specs but also for its durability in the expected environment:
- Temperature and humidity: If the humanoid will face extreme cold or heat, or high humidity, components like linear guides and bearings might need special materials or lubricants. For example, stainless steel linear rails resist corrosion, and high-temperature grease can keep a joint bearing running smoothly in heat.
- Contamination exposure: Dust, sand, or debris can impair moving parts. Sealed bearings (e.g., the “UU” double seals on IKO CRBH208AUU or CFE10-1UUR) and wipers or covers on linear guides are critical for keeping abrasives out. In very dirty environments, spherical bushings might be chosen over rolling bearings since they have no small moving elements to jam (though they might wear faster without lubrication).
- Maintenance access: Some components come in maintenance-free versions (like IKO’s C-Lube linear guides that automatically lubricate the rolling elements). In a humanoid that is expected to operate for long periods without human intervention, such self-lubricating or sealed-for-life options are highly beneficial.
- Shock and impact: Humanoids that walk or carry loads experience shock loads (for instance, foot impact on the ground). Using high-capacity bearings (as shown in the tables above) with some safety margin helps ensure longevity. Spherical joints and cam followers can also be selected in heavy-duty versions to withstand intermittent shock forces.
Because there are many such considerations, it pays to collaborate with motion component experts during the design phase. Pacific International Bearing works closely with manufacturers like IKO International to help robot designers optimize component selection and protective features for the intended environment. Whether it’s choosing a high-rigidity crossed roller bearing for a shoulder joint, a miniature linear guide for a finger, or a durable cam follower for an ankle linkage, making the right choice early can dramatically improve your humanoid robot’s performance and reliability.
Please contact us at [email protected] or call us at 1-800-228-8895.