Your cart is empty










 Short Rigid Couplings
Short Rigid Couplings Controlflex Couplings
Controlflex Couplings Jaw Couplings
Jaw Couplings Oldham Couplings
Oldham Couplings Bearing Locknuts – TCN
Bearing Locknuts – TCN Double Wide Shaft Collars
Double Wide Shaft Collars Heavy Duty Shaft Collars
Heavy Duty Shaft Collars International Series Shaft Collars
International Series Shaft Collars Keyed Shaft Collars
Keyed Shaft Collars Mountable Shaft Collars
Mountable Shaft Collars Quick Clamping Shaft Collars
Quick Clamping Shaft Collars Set Screw Shaft Collars
Set Screw Shaft Collars Thin Line Shaft Collars
Thin Line Shaft Collars Threaded Shaft Collars – Pacific International Bearing Products
Threaded Shaft Collars – Pacific International Bearing Products Two-Piece Shaft Collars
Two-Piece Shaft Collars Friction Bearing Universal Joints
Friction Bearing Universal Joints Needle Bearing Universal Joints
Needle Bearing Universal Joints
Bearings
A Guide to Robot Joint Bearing Design
07 October, 2025
18 min read
Pacific International Bearing offers drive solutions for robotic automation and bearings for robotic articulating joints. Articulating robotic joints are the backbone of Industrial robotic arms.
Articulated robotic joints are designed to provide a wide range of motion allowing for use in many different applications. Most Industrial robotic arms will have between 4-6 revolute joints with up to 6 degrees of misalignment. Some applications for articulating robotic joints include palletizers, pick and place, welding, assembly tasks, dispensing devices and scanning machines.
We offer a standard portfolio of rolling bearings and through our association with Schaeffler provide a number of robotic system components, precision gearboxes, pivot bearing supports, drive motors, sensors, and for the seventh axis. Schaeffler offers two precision gearbox product ranges, graded by performance for both standard and precision applications. Production processes can be monitored with a torque sensor integrated into the gearbox which does not require any extra space.
Pacific International Bearing additionally offers Kaydon bearings which are commonly used in robotic articulating arms due to their thin cross-section. The Kaydon Reali-Slim® thin section series bearings are designed to save weight, use less space, reduce friction, increase design flexibility and provide high running accuracy. Perfect for use in articulating robotic joints. Select and buy Kaydon thin section bearings.

Kaydon Reali-Slim bearings are useful in the following applications:
- aerospace
- robotics
- semiconductor
- industrial machinery
- machine tools
- medical devices and machines
- robotic joints
Kaydon as part of the SKF group provides a standard assortment of Reali-Slim thin section bearings from stock. Thin section bearings can be purchased as open or sealed. Contact Pacific International Bearings as these bearings can be customized to meet specific application needs.
Kaydon Thin section bearings are available in metric or imperial dimensions and with three basic types being C, A or X.
Each of these 3 designs are useful in many Robotic applications and again owes their preference by Designers and Engineers to their utility for lightweight and thin cross sections. Kaydon is the recognized leader for manufacturing quality thin section bearings. Kaydon is a USA manufactured product.\
SKF has apparently added KDN to the prefix of the Kaydon Part numbering system for some reason. The thing to note on part numbers is you will see the C, X, or A as part of the part number for you to easily identify what type of bearing it is. For example KDN.JA045CPO is a radial ball bearing type C, metric dimensions. Part number KDN.J02508XP0 is a four point contact Type X, metric dimensions, and Part number KDN.K02513AR0 is an Angular contact bearing Type A, metric dimensions. You can access all the Kaydon bearing part numbers.
Since bearings applied in robotic applications must be precise and be of the best quality it is extremely important to start by working with the right companies. PIB stocks products for bearing manufacturers who are best in class. Schaeffler and Kaydon in particular probably provide a one stop for your potential bearing needs and are available through Pacific International Bearing Inc.
Miniature Bearings for Humanoid Robot Hands
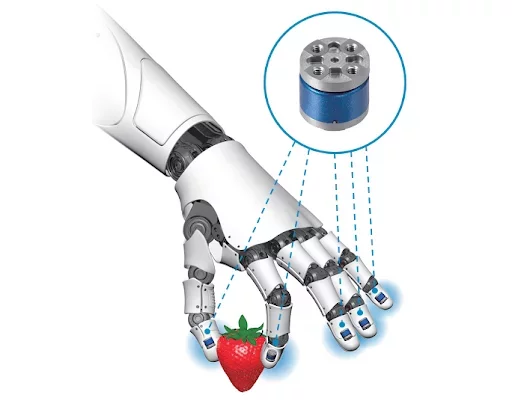
Humanoid robot hands incorporate dozens of small joints and linkages, each relying on miniature precision bearings to mimic the dexterity of a human hand. PIB supplies ultra-compact deep-groove ball bearings with inner diameters as small as 2 mm, enabling designers to fit robust joints into confined finger assemblies. These miniature bearings are available in high-carbon chromium steel (SUJ2) or stainless steel constructions, with open or shielded designs to balance friction and environmental protection. For example, Mechanical components – Achievement items for Humanoid robot hand:
| Model | I/D (mm) | O/D (mm) | W (mm) | MATERIAL | SHIELD/SEAL |
| L-520ZZW52 | 2 | 5 | 2.5 | SUJ2 | SHIELD |
| DDR-620ZZ | 2 | 6 | 2.5 | STAINLESS STEEL | SHIELD |
| DDL-630H | 3 | 6 | 2.5 | STAINLESS STEEL | OPEN |
| DDL-630ZZ | 3 | 6 | 2.5 | STAINLESS STEEL | SHIELD |
| DDL-730ZZ | 3 | 7 | 3 | STAINLESS STEEL | SHIELD |
| DDL-740ZZ | 4 | 7 | 2.5 | STAINLESS STEEL | SHIELD |
| DDL-740H | 4 | 7 | 2.5 | STAINLESS STEEL | OPEN |
| DDL-840 | 4 | 8 | 2 | STAINLESS STEEL | OPEN |
| L-850ZZ | 5 | 8 | 2.5 | SUJ2 | SHIELD |
| DDL-850H | 5 | 8 | 2 | STAINLESS STEEL | OPEN |
| DDL-840ZZ | 4 | 8 | 3 | STAINLESS STEEL | SHIELD |
| L-940ZZ | 4 | 9 | 4 | SUJ2 | SHIELD |
| L-950ZZ | 5 | 9 | 3 | SUJ2 | SHIELD |
| DDL-950 | 5 | 9 | 2.5 | STAINLESS STEEL | OPEN |
| DDL-1280H | 8 | 12 | 3.5 | STAINLESS STEEL | OPEN |

These examples – drawn from Mitsumi’s offerings for robotic hand mechanisms – demonstrate the range of miniature bearing sizes (roughly 2–8 mm bore) and configurations available. Such bearings exhibit low friction and tight tolerances, ensuring smooth motion in finger joints and grippers. By using shielded variants (ZZ suffix) where needed, sensitive actuators are protected from dust or debris, while open variants (H suffix) are available for lower drag or when custom greases are applied. With PIB’s miniature bearing range, robot designers can achieve human-like dexterity and reliability in compact hand assemblies.
Types of Bearings Available for use in Robotics
Understanding robotic joint mechanics means knowing which bearing types are best suited for each application for robotic joints are designed. Bearings are critical components that enhance the functionality of robotic joints by reducing friction, enabling smooth operation, and handling loads efficiently.
Robot joint mechanics explained
Robot joint mechanics refer to the structural and functional design of the joints in a robotic system, which allows for movements such as rotation, sliding, or a combination of motions. These joints mimic the mechanical actions of human joints but are engineered with higher precision and load-bearing capabilities to perform specific tasks.
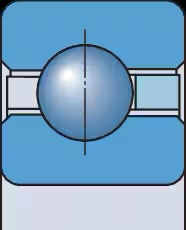
- Rotary joints (revolute joints): these joints facilitate rotation around a single axis and are crucial in applications requiring rotational movement, such as robotic arms used in assembly lines or painting robots. Typical specifications might include a rotational speed capability of up to 250 RPM and a torque handling of up to 150 Nm, depending on the robot’s size and purpose. Spherical plain bearings serve as an acceptable bearing in this application. Due to this type of bearing having the versatility to accommodate misalignment, oscillation, and tilting movements, it is an ideal solution for robotic rotary joints. Spherical plain bearings are designed for both high radial and axial loads. Buy spherical plain bearings and download pdf data.
- Linear joints (prismatic joints): linear joints enable movement in a straight line and are essential in applications like automated guided vehicles (AGVs) that transport materials across flat surfaces. These joints might need to handle dynamic loads from 500 N up to 5,000 N, with travel speeds ranging from 100 mm/s to over 1,000 mm/s.
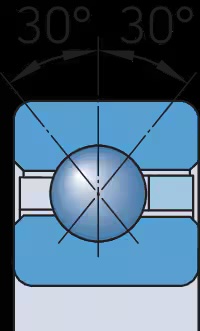
- Spherical joints: offering two degrees of rotational freedom, these joints are used in more complex robots, such as those deployed in advanced manufacturing and medical robotics, where multi-directional flexibility is required. They need to manage combined moment loads that can exceed 200 Nm and allow for angular movements of ±90 degrees about multiple axes.
Role of bearings in enhancing joint mechanics
Bearings are indispensable in managing the interaction between moving parts of robot joints, ensuring that motion is both smooth and controlled. The selection and design of bearings are critical for achieving the desired level of performance in robotic systems.
Types of bearings commonly used in robotics:
Ball Bearings: Utilized in both rotary and spherical joints, ball bearings are commonly specified due to their ability in handling both radial and axial loads efficiently. For instance, a typical ball bearing might be rated for radial loads of up to 5,000 N and axial loads of up to 2,500 N.
Roller Bearings: Best suited for linear joints or applications where heavy loads are a factor. Roller bearings, due to their larger contact surface, can distribute loads more effectively, supporting radial loads that could be as high as 10,000 N in industrial robotics.
Specialty Bearings: These include precision-engineered bearings designed to meet specific requirements such as high-speed operation, low noise, or resistance to harsh environments. For example, specialty bearings used in a high-speed robotic assembly might operate at speeds up to 10,000 RPM, with enhancements for wear resistance and minimal maintenance requirements.
The integration process involves meticulous planning and precision engineering to ensure that the bearings not only fit physically but also perform functionally under the expected operational conditions. The design considerations include:
- Load Calculations: Accurate determination of expected loads (radial, axial, moment) based on the robotic application.
- Motion Specifications: Defining the speed and precision requirements of the joint movement.
- Environmental Factors: Considering factors such as temperature fluctuations, presence of contaminants, and humidity, which might influence the choice of bearing materials and sealing solutions.
Understanding these detailed aspects of robot joint mechanics and the strategic integration of bearings is essential for developing robotic systems.
Materials and Manufacturing Processes
In the bearing industry, steel remains one of the most commonly used materials due to its high fatigue resistance and load-bearing capacity. High-carbon chromium steel, particularly AISI 52100 steel, is the preferred choice, offering excellent hardenability and tensile strength of around 800 MPa. This steel is frequently employed in high-load robot joints because of its durability under repetitive stress.
For more specialized applications, such as high-speed or high-precision robotics, ceramic materials like silicon nitride (Si3N4) offer notable advantages. With a density 40% lower than steel, these ceramic bearings reduce the overall weight of the joint while maintaining exceptional hardness and friction resistance. This allows for better responsiveness and efficiency in the robot’s movements. Additionally, they can operate at temperatures up to 1000°C without mechanical degradation.
In other applications, polymer composites like PEEK (Polyether ether ketone) provide an ideal solution where weight reduction and noise dampening are required. These materials deliver strong wear resistance, chemical inertness, and low moisture absorption, making them suitable for light-load robotic tasks.
Manufacturing processes for robot joint bearings
To ensure that these materials are shaped into high-precision bearings, manufacturers rely on various specialized manufacturing processes:
- Precision machining
The machining of bearing races and rolling elements is typically performed through turning, grinding, and honing, using CNC (Computer Numerical Control) machines. This process achieves tight tolerances of +/- 0.001 mm, vital for maintaining high precision in robotic joints. - Heat Treatment
Heat treatment involves carburizing high-carbon chromium steel at 900°C and then rapidly quenching and tempering it to create a hard outer shell with a tough core. This treatment enhances the bearing’s surface hardness up to 62 HRC, which is essential for preventing wear and fatigue. - Surface Treatment
Coating the bearing surfaces with materials like Titanium Nitride (TiN) reduces friction by up to 50%, protecting the bearing against corrosion and minimizing wear. - Assembly and Quality Control
Automated assembly lines ensure consistent assembly quality, while each bearing undergoes rigorous quality testing for dimensional accuracy, hardness, and load capacity to ensure they meet the specifications required for robotic applications.
| Material | Tensile strength (MPa) | Temperature resistance (°C) | Specific advantages |
| AISI 52100 Steel | 800 | Up to 300 | High fatigue resistance, good durability |
| Si3N4 Ceramic | 600 – 800 | Up to 1000 | Low weight, excellent corrosion resistance |
| PEEK Composite | 90 – 100 | Up to 250 | Lightweight, chemically inert, vibration dampening |
By selecting the appropriate material and optimizing the manufacturing processes, bearings for robot joint designs can achieve the precision, load capacity, and durability required to support the intricate movements of modern robotics. This combination of careful material selection and precision manufacturing ensures that bearings continue to enhance robotic performance and provide reliable operation in challenging conditions.
Selecting Bearings for Robot Joints
Choosing the right bearings for robot joints is a step in ensuring optimal performance, durability, and reliability. The proper selection depends on understanding the unique demands of each robotic joint and applying the right criteria to meet these requirements. This guide will help you through the process of selecting the most suitable bearings for your robotic joints.
1. Identify the joint’s mechanical requirements
Understanding the specific mechanical requirements is essential to define the bearing’s load capacity, precision, and speed characteristics.
- Determine the types of loads (radial, axial, or combined) and the maximum load capacities required. For example, a rotary joint may need to handle a combined load of up to 300 N radially and 100 N axially.
- Determine the required operating speed. A high-speed rotary joint might need bearings that support rotational speeds exceeding 5,000 RPM, whereas a linear joint may need to move at 100 mm/s.
- Determine the joint’s required range of motion. For instance, a spherical joint may need to rotate 120 degrees about one axis while maintaining load-bearing stability.
2. Match bearing types to joint mechanics
Different bearing types are better suited to specific joint types:
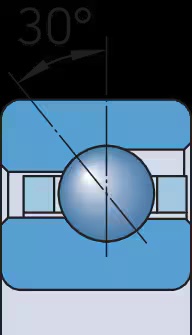
- Suitable for high-speed rotary applications where minimal friction and smooth operation are required. Angular contact ball bearings work well in joints with both radial and axial loads.
- Ideal for linear joints or applications requiring high radial load capacity. Cylindrical or tapered roller bearings handle heavier loads due to the increased contact area of the rolling elements.
- Provide multi-directional movement and are suitable for spherical joints or joints with misalignment issues.
3. Consider the operational environment
- Temperature: If the joint operates in a high-temperature environment (above 300°C), ceramic bearings or specially coated steel bearings may be necessary to maintain performance.
- ContaminantsIn dusty or corrosive environments, sealed bearings or those with corrosion-resistant coatings are recommended.
- Lubrication: Choose bearings with appropriate lubrication options. Self-lubricating bearings can be advantageous for maintenance reduction.
4. Evaluate precision requirements
Choose bearings with higher precision classes, such as P4 or P5, which have tighter tolerance limits for minimal runout and play.
5. Ensure proper assembly and maintenance
Establish regular maintenance schedules, especially in high-load or high-speed joints. Use quality lubricants that match the bearing specifications.
Conclusion
Choosing the right bearings for your robot joints is a critical step in ensuring optimal performance, longevity, and reliability. By thoroughly understanding the joint’s mechanical requirements, environmental conditions, and precision needs, you can select the ideal bearing type and material to ensure precise movement and stability. Matching these requirements with the appropriate bearing technology — be it ball, roller, or composite bearings — will enable you to build a robotic system that functions smoothly and efficiently.
PIB Sales is here to help you find the perfect bearing solution for your robotic joints. With a comprehensive range of high-quality bearings and expert guidance, we can help you navigate your selection process and find the bearings that best suit your project’s specifications. Visit PIB Sales to learn more or reach out directly to discuss your specific needs.