Your cart is empty










 Short Rigid Couplings
Short Rigid Couplings Controlflex Couplings
Controlflex Couplings Jaw Couplings
Jaw Couplings Oldham Couplings
Oldham Couplings Bearing Locknuts – TCN
Bearing Locknuts – TCN Double Wide Shaft Collars
Double Wide Shaft Collars Heavy Duty Shaft Collars
Heavy Duty Shaft Collars International Series Shaft Collars
International Series Shaft Collars Keyed Shaft Collars
Keyed Shaft Collars Mountable Shaft Collars
Mountable Shaft Collars Quick Clamping Shaft Collars
Quick Clamping Shaft Collars Set Screw Shaft Collars
Set Screw Shaft Collars Thin Line Shaft Collars
Thin Line Shaft Collars Threaded Shaft Collars – Pacific International Bearing Products
Threaded Shaft Collars – Pacific International Bearing Products Two-Piece Shaft Collars
Two-Piece Shaft Collars Friction Bearing Universal Joints
Friction Bearing Universal Joints Needle Bearing Universal Joints
Needle Bearing Universal Joints
Robotics
Achieving Smooth Motion in Humanoid Robots: The Bearing Engineer’s Perspective
02 April, 2026
17 min read
Smooth motion in humanoid robots depends primarily on bearing selection. The right bearing matched to load type, joint geometry, and operating environment eliminates vibration, reduces friction, and keeps actuators running quietly. Pacific International Bearing Sales stocks name brand precision miniature, standard and specialty bearings that robotic engineers rely on across every joint, from ankle to fingertip.
Key Takeaways
- Bearings are the mechanical interface between motor torque and fluid joint movement; without the right spec, motion quality degrades immediately.
- Humanoid robots require multiple bearing types across different joints: crossed roller, angular contact, four-point contact, and thin-section bearings. Each serves distinct load profiles.
- Noise, backlash, and premature wear are nearly always a bearing selection problem, not a software or motor problem.
- Miniature size and low weight are non-negotiable, every gram and millimeter saved in a joint assembly accumulates affecting the full robot.
- PIB stock name brands like NMB, SKF and RBC precision bearings supporting robotics engineers. PIB offers assistance with knowledgeable support matching bearing specs to application requirements.
Why Motion Quality Starts at the Joint
Watch a humanoid robot walk across a room. If the motion looks mechanical, choppy, or hesitant, the first thing experienced engineers check is the joints, specifically, the bearings inside them. Motion quality in robotics is not primarily a software problem. It is a mechanical one.
Every joint in a humanoid robot is essentially a controlled rotation under load. The ankle absorbs impact forces while redirecting propulsion. The knee maintains stable extension through a dynamic gait cycle. The wrist needs to position a hand with sub-millimeter repeatability. The fingers need to grip, release, and reposition dozens of times per minute without generating noise or drift.
That level of performance does not happen by accident. It is engineered into the bearing geometry, material, lubrication, and preload at the design stage. Get those decisions right and you get fluid, quiet, repeatable motion. Get them wrong and you get a robot that sounds like a shopping cart with a bent wheel.
This article covers the specific bearing requirements for humanoid robot joints, how different bearing types serve different motion functions, what the key specifications actually mean in practice, and where Pacific International Bearing Sales fits into the supply chain for teams building the next generation of robotics.
Joint Count and Load Distribution in a Typical Humanoid Robot
Before diving into bearing types, it is worth grounding the conversation in the actual mechanical demands of a full humanoid platform. A typical humanoid robot has between 25 and 30 degrees of freedom. Each one represents a joint that needs rotational support.
Here is how those joints typically break down by zone and load character:
| Joint Zone | Primary Load Type | Common Bearing Type | Precision Requirement |
| Ankle (x2) | High radial + axial impact loads | Crossed roller or angular contact | Very high |
| Knee (x2) | High radial, dynamic cycling | Angular contact, crossed roller | Very high |
| Hip (x2) | Multi-directional, high moment | Four-point contact, crossed roller | High |
| Shoulder (x2) | Multi-axis rotation, moderate load | Angular contact, thin-section | High |
| Elbow (x2) | Moderate radial, positioning | Angular contact, deep groove | Medium |
| Wrist (x2) | Precision, low backlash | Crossed roller, four-point contact | High |
| Neck | Light load, ultra-low noise | Miniature deep groove, thin-section | Very high |
| Finger joints (up to 15) | Micro-scale, precise positioning | Miniature deep groove, sleeve bearings | Very high |
| Spine / torso | Moment loads, stability | Crossed roller, slewing rings | High |
That is a lot of bearing positions with very different requirements. One of the most common engineering mistakes is treating all robot joints as interchangeable and specifying a single bearing type across the full platform. That approach almost always results in overengineered joints in some areas and underperforming ones in others.
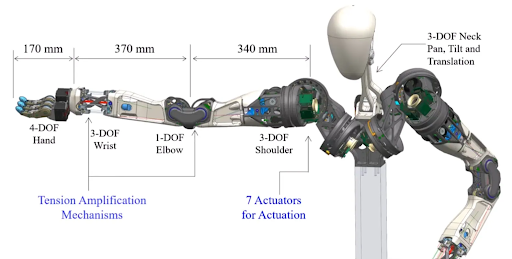
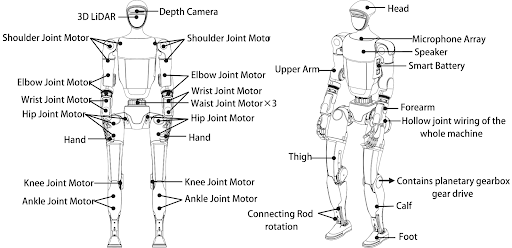
Labeled anatomy of a humanoid robot joint showing bearing position within the actuator stack
Bearing Types in Humanoid Robots: What Each One Does and Why It Matters
1. Crossed Roller Bearings
Crossed roller bearings are the main component of robotic rotary actuators. Their cylindrical rollers are arranged at alternating 90-degree angles, which allows a single bearing to handle radial loads, axial loads from both directions, and tilting moment loads simultaneously.
In a humanoid robot, this makes them ideal for output-stage bearings in rotary actuators—especially at the ankle, knee, and wrist, where the joint must support complex, shifting loads while maintaining precise angular positioning. The rigidity is exceptional. Deflection under load is minimal. And because they handle moment loads without requiring a pair of opposing bearings, they reduce assembly complexity and axial space requirements.
The trade-off is cost and size. Crossed roller bearings are precision components that require careful handling and proper preload to function correctly. Over-preload increases friction and heat; under-preload introduces backlash. Getting that balance right is a significant part of the actuator design process.
2. Angular Contact Ball Bearings
Angular contact bearings are designed to handle both radial and axial (thrust) loads, with the load angle built into the contact geometry. They are frequently used in pairs to handle bidirectional axial loading one bearing handles thrust in each direction.
In humanoid robot applications, angular contact bearings appear in servo motor assemblies, elbow joints, and wherever a joint needs to manage directional thrust while maintaining speed capability. They tolerate higher rotational speeds than crossed roller bearings and are widely available in precision grades, which makes them a practical choice for mid-limb joints where load requirements are demanding but not extreme.
3. Four-Point Contact Ball Bearings
Four-point contact bearings use a single row of balls contacting both inner and outer rings at four points. That geometry allows them to handle radial loads, axial loads in both directions, and moment loads all in a compact, single-bearing package.
They are a space-efficient alternative to crossed roller bearings in applications where cost is a constraint and the precision requirements are slightly relaxed. In humanoid robots, they appear frequently in hip and shoulder joints, where multi-directional loading is the norm and assembly space is tight. Some designs use split inner or outer rings to allow larger contact angles and higher axial load capacity.
4. Thin-Section Ball Bearings
Thin-section bearings also called slim-section bearings maintain a constant cross-section regardless of bore diameter. A large thin-section bearing has the same narrow ring profile as a small one, which dramatically reduces weight and package size without sacrificing the bore diameter needed to run a hollow shaft through the joint for wire routing.
In humanoid robots, this matters enormously. Routing power and signal cables through joint centers requires hollow shafts. Hollow shafts require large bore diameters. Without thin-section bearings, achieving a large bore in a compact joint profile would be impossible. These bearings are particularly valuable in shoulder and hip assemblies where the mechanical envelope is tight and wire routing is critical.
5. Miniature Deep Groove Ball Bearings
Deep groove ball bearings are the most common bearing type in the world, and miniature versions are essential in humanoid robots particularly in finger joints, neck actuators, and any other application requiring quiet, smooth rotation in an extremely compact form factor.
Their low friction profile, availability in ultra-quiet ABEC-7 and ABEC-9 precision grades, and compatibility with a wide range of lubricants make them the default choice for low-load, high-precision positions. For a neck actuator in a robot designed to operate in home or office environments, audible bearing noise is unacceptable. Miniature deep groove bearings, properly selected and lubricated, can operate nearly silently.
Bearing Specification Reference: Humanoid Robot Applications
Below is a practical specifications comparison across common bearing types used in humanoid robot joints. These values represent typical ranges for robotics-grade components specific dimensions and ratings vary by manufacturer and series.
| Bearing Type | Precision Grade | Load Handling | Primary Joint Use | Noise Performance | Speed Rating | Size Efficiency |
| Crossed Roller | ABEC-5 to P2 | Radial + Axial + Moment | Ankle, Knee, Wrist, Hip | Excellent | Low–Medium | High |
| Angular Contact | ABEC-5 to ABEC-7 | Radial + Axial (directional) | Elbow, Motor output, Knee | Good | High | Medium |
| Four-Point Contact | ABEC-5 to ABEC-7 | Radial + Axial + Moment (single ring) | Hip, Shoulder, Wrist | Good | Medium–High | Medium |
| Thin-Section | ABEC-5 to ABEC-7 | Radial + light Axial | Shoulder, Hip (hollow shaft) | Good | Medium–High | High |
| Miniature Deep Groove | ABEC-7 to ABEC-9 | Radial + light Axial | Fingers, Neck, Servo motor | Very Good | Very High | High |
The Noise Problem: Why Bearing Selection Directly Affects Perceived Robot Quality
There is a dimension of bearing selection that does not always make it into engineering spec sheets: perceived quality. In industrial machinery, bearing noise is evaluated in terms of decibels and vibration frequency. In a humanoid robot designed for public or domestic environments, the threshold is much lower and the consequences of getting it wrong are immediately obvious to anyone in the room.
A robot that clicks, grinds, or whirs while walking does not read as intelligent or capable, regardless of what its sensors and software are doing. The bearing is the interface between mechanical power and smooth motion, and any roughness in that interface is felt and heard throughout the entire system.
The factors that determine bearing noise output include raceway surface finish, ball grade, cage material, and lubrication type. ABEC-7 and ABEC-9 precision grades significantly reduce raceway irregularities that cause vibration. Ceramic hybrid balls reduce rolling noise and heat generation compared to standard steel. Polymer cages eliminate the metallic clattering that occurs with stamped steel cages. Low-noise greases, applied in the correct quantity, dampen vibration without creating drag.
None of these upgrades are dramatic individually. Together, they produce a bearing that is genuinely quiet the kind of quiet that allows a robot to stand next to a person without announcing its mechanical presence every time it adjusts its posture.
Engineering note: Noise in a robotic joint is almost never caused by a single component failure. It is usually the accumulated result of three or four marginal decisions: a bearing grade that is close but not quite right, a lubrication spec that was copied from a similar application without adjustment, a preload value that was estimated rather than calculated. Precision in each of those decisions is what separates a genuinely smooth robot from one that merely meets the spec sheet.
Material Selection: Steel, Stainless, or Ceramic?
Most industrial bearings use chrome steel (52100) as the default material. It is cost-effective, widely available, and performs reliably across a broad range of conditions. For many humanoid robot applications, it is entirely appropriate.
But there are situations where the default is not the best choice. Consider a robot designed to operate in a food service or medical environment, where corrosion resistance is a priority. Or a joint assembly where electromagnetic interference could compromise nearby sensors. Or a high-cycle finger joint where reducing rolling mass improves response time. In each of those cases, material selection is a real engineering variable, not just a default.
Stainless steel bearings (440C or 316) provide corrosion resistance in moist or chemically exposed environments. Silicon nitride ceramic balls reduce rolling mass, eliminate magnetic interference, and run cooler under high-speed conditions. Full ceramic bearings, both rings and balls in ceramic are used in extreme environments but are fragile and expensive. Hybrid ceramic bearings (steel rings, ceramic balls) offer most of the performance benefits of full ceramic, with better impact resistance and a more reasonable cost.
The right material choice is always application-specific. A blanket decision to use ceramic across an entire robot platform because it sounds more advanced will add cost without adding value in most joint positions. A targeted decision to use hybrid ceramic in the neck actuators specifically because that is where noise and electromagnetic compliance matter most is good engineering.
Finding the Right Bearings for Your Robotics Program
PIB stocks a broad selection of precision miniature, thin-section, and specialty bearings suited to humanoid and collaborative robot applications. The PIB online catalog at pibsales.com lets engineering teams search by bore diameter, series, load rating, precision grade, and material with technical data available directly in the product listings. For applications that need more than a standard catalog pull, the PIB team can work through the selection process with you.
Pacific International Bearing Sales has been supplying precision bearings to engineering teams across industrial, aerospace, medical, and emerging technology markets for decades. The shift toward humanoid robotics is one of the more technically demanding application areas PIB has supported, and the team brings genuine familiarity with the bearing types and specifications that matter in robotic joint design.
Whether you are specifying bearings for a full humanoid platform, a collaborative robot end effector, or a single actuator assembly, PIB’s catalog depth and application support can shorten the time from specification to sourced component significantly.
FAQ
| Question | Answer |
| What bearing type is most commonly used in humanoid robot joints? | Crossed roller bearings are an often specified choice for primary rotary actuator output stages because they handle radial, axial, and moment loads in a single compact assembly. Angular contact bearings and four-point contact bearings are common at mid-limb joints. Miniature deep groove bearings are standard in low-load, high-precision positions like finger joints and neck actuators. |
| How does bearing preload affect robot performance? | Preload eliminates internal clearance and removes backlash from joint response. A correctly preloaded bearing allows a robot joint to respond immediately to control signals without dead zone or positional drift. Too much preload increases friction and heat; too little allows backlash to creep back. Preload should be calculated for each specific application, not copied from a generic reference. |
| Why do bearing noise levels matter in humanoid robots? | Humanoid robots increasingly operate in environments where audible noise is evaluated as a proxy for mechanical quality. A robot that produces bearing noise while walking or gesturing reads as less capable and less refined, regardless of software performance. Precision-grade bearings with appropriate lubrication and cage materials can reduce joint noise to near-inaudible levels. |
| When should ceramic or hybrid ceramic bearings be used? | Hybrid ceramic bearings (steel rings, silicon nitride balls) are appropriate when electromagnetic interference is a concern, when heat generation in high-speed joints needs to be reduced, or when long service life under high-cycle conditions is required. Full ceramic bearings are used in extreme corrosion or temperature environments but are expensive and impact-sensitive. |
| What precision grade should be specified for robotic bearings? | Most robotic actuator applications require ABEC-5 (ISO P5) as a minimum. High-accuracy positioning joints typically specify ABEC-7 (ISO P4). Ultra-precision applications, such as surgical robotics or end effectors requiring micron-level repeatability, may require ABEC-9 (ISO P2) or better. Standard ABEC-3 bearings are generally insufficient for humanoid joint applications. |
Summary
Smooth motion in humanoid robots is not a software feature. It is an outcome of mechanical precision at the component level, starting with the bearings that sit at the core of every joint.
The decisions that matter most are not exotic: bearing type matched to load profile, precision grade appropriate to the positioning requirement, preload calibrated to eliminate backlash without adding friction, lubrication specified for the actual operating conditions, and material selected for the environment. None of those decisions are complicated individually. Together, they determine whether a robot moves with the kind of fluid, controlled motion that makes it useful in the real world.
PIB has the bearing inventory and application knowledge to support teams working through those decisions. If you are specifying bearings for a humanoid or collaborative robot platform, the PIB online catalog is a solid starting point and the team behind it can take you further when the application needs more than a catalog search.
Browse the PIB online catalog: pibsales.com