Your cart is empty










 Short Rigid Couplings
Short Rigid Couplings Controlflex Couplings
Controlflex Couplings Jaw Couplings
Jaw Couplings Oldham Couplings
Oldham Couplings Bearing Locknuts – TCN
Bearing Locknuts – TCN Double Wide Shaft Collars
Double Wide Shaft Collars Heavy Duty Shaft Collars
Heavy Duty Shaft Collars International Series Shaft Collars
International Series Shaft Collars Keyed Shaft Collars
Keyed Shaft Collars Mountable Shaft Collars
Mountable Shaft Collars Quick Clamping Shaft Collars
Quick Clamping Shaft Collars Set Screw Shaft Collars
Set Screw Shaft Collars Thin Line Shaft Collars
Thin Line Shaft Collars Threaded Shaft Collars – Pacific International Bearing Products
Threaded Shaft Collars – Pacific International Bearing Products Two-Piece Shaft Collars
Two-Piece Shaft Collars Friction Bearing Universal Joints
Friction Bearing Universal Joints Needle Bearing Universal Joints
Needle Bearing Universal Joints
Robotics
Precision in Motion: The Core Components Powering Humanoid Robots
10 October, 2025
15 min read
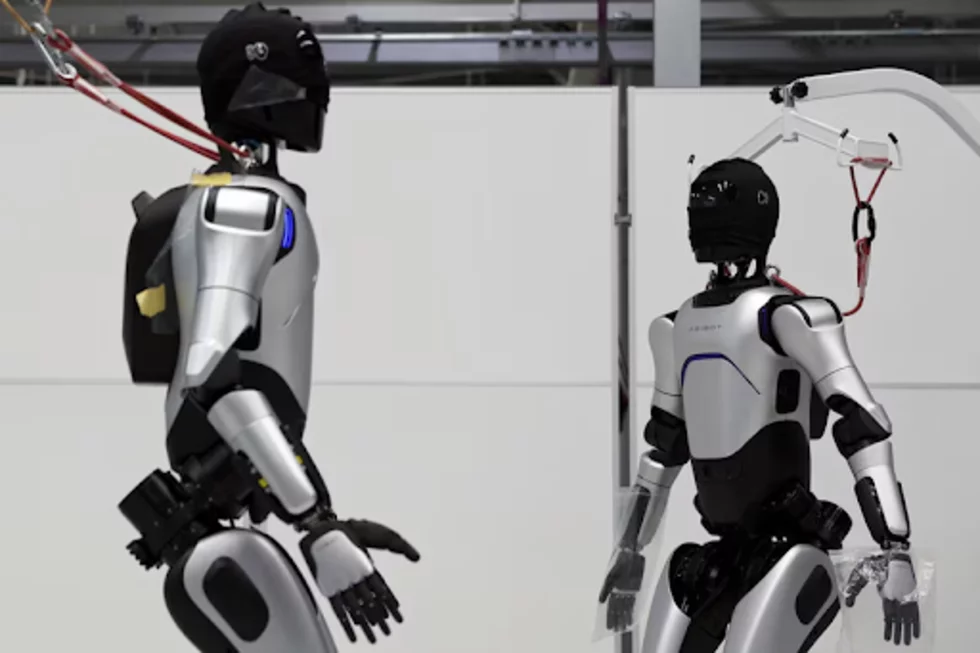
The rise of humanoid robots marks a turning point in mechanical engineering. What once existed only in science fiction now stands on factory floors, walks in laboratories, and interacts in service environments. From Boston Dynamics’ Atlas to Tesla’s Optimus and Zhiyuan RAISE A1, humanoid robots demonstrate how mechanical design, motor efficiency, and motion control converge into human-like movement.
But underneath their sleek exteriors lies an intricate network of bearings, gearboxes, motors, and sensors — the mechanical foundation that makes humanoid locomotion possible.
At Pacific International Bearing Sales (PIB Sales), we provide precision bearings, harmonic drives, planetary gear systems, sensors, and frameless torque motors that empower engineers to create these dynamic systems. This article explores the main humanoid robot components, combining mechanical detail with practical sourcing insights — written from the perspective of the engineers who design motion itself.
The Mechanical Core of Humanoid Robots
Humanoid robots are structured around a multi-axis electromechanical system. Each joint must generate smooth torque while maintaining positional accuracy within fractions of a degree. This de
| Subsystem | Engineering Role | Key Components |
| Actuation | Converts electrical energy into mechanical motion | Frameless torque motors, BLDC servos |
| Transmission | Multiplies torque and stabilizes speed | Harmonic drives, planetary gearboxes |
| Support & Load Bearing | Enables smooth rotation under combined loads | Cross-roller and thin-section bearings |
| Sensing | Provides position, torque, and force feedback | Encoders, strain gauges |
| Control | Coordinates power and motion | Servo controllers, CAN/RS485 networks |
| Structure | Provides mechanical stability | Lightweight aluminum or carbon-fiber frame |
Each of these is critical. The motors and gear systems dictate force and movement precision, while the bearings determine longevity and stiffness — the quiet foundation for the robot’s posture, gait, and dexterity.
The “muscle” of a humanoid robot is its actuator — a combination of a motor and a gearbox designed to mimic human muscle performance.
Humanoids need power-dense motors with minimal inertia, high torque, and fast control response. Among available options, BLDC motors and frameless torque motors dominate because of their efficiency and integration flexibility.
Each of these subsystems — from control and power management to actuation and sensing — plays a critical role in defining the efficiency, stability, and dexterity of a humanoid robot.
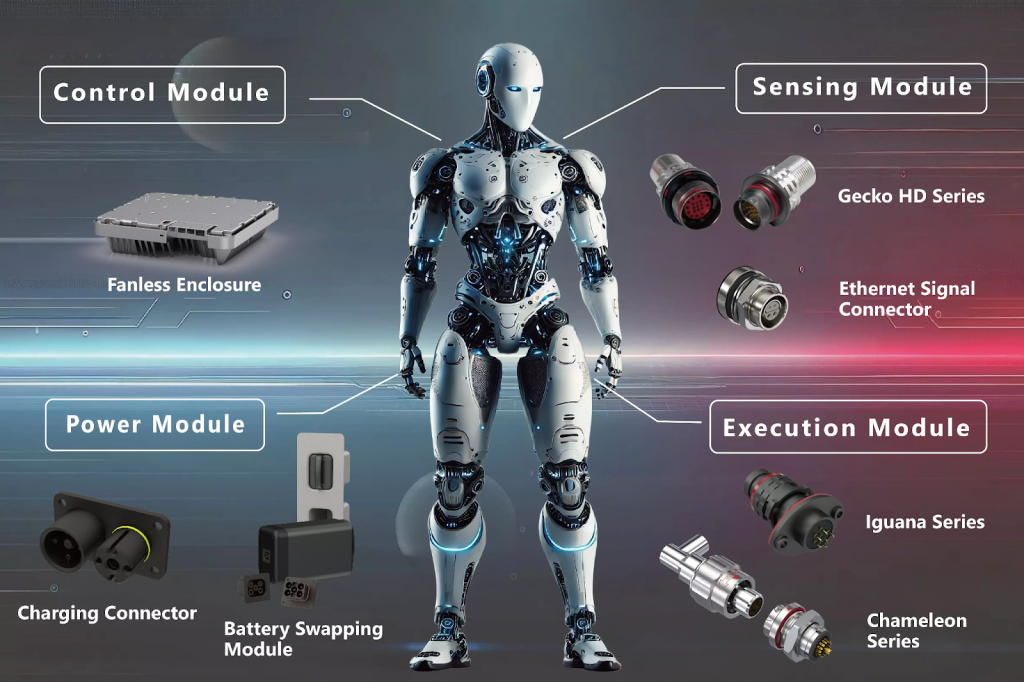
Together, these modules form a complete mechatronic ecosystem, where precision bearings, harmonic drive gearboxes, and frameless torque motors ensure every axis moves as intended.
BLDC Motors: Efficient, Reliable Workhorses
Brushless DC (BLDC) motors remain the backbone of small and mid-size humanoid joints due to their efficiency, controllability, and long lifespan. They operate without brushes or commutators, minimizing wear and reducing maintenance requirements, ideal for continuous operation in robotics.
Typical engineering applications include hand, wrist, and elbow joints, where compact form factors are critical.
| Part Number | Voltage | Gear Ratio | Torque (Nm) | Typical Use |
| MX5310PG56 | 48 V | 56:1 | 25 | Leg actuation |
| MX3310PG42 | 24 V | 42:1 | 12 | Shoulder or arm motion |
| MX2810PG36 | 12 V | 36:1 | 4.5 | Finger or wrist joints |
These integrated BLDC planetary assemblies deliver a balance of torque and responsiveness. Their sealed gearheads provide low backlash, making them ideal for robot joint actuators that demand repeatable precision
Frameless Torque Motors: Compact Power and Precision
As humanoid designs evolve toward modular architecture, frameless torque motors have become the preferred solution for major joints such as hips, knees, and shoulders.
Unlike traditional housed motors, frameless designs integrate the rotor and stator directly into the robot’s mechanical structure. This reduces weight and allows custom housing geometries for optimized cooling and stiffness.
| Model | Outer Ø (mm) | Rated Torque (Nm) | Current (A) | Application |
| HTR-14-120-B-2 | 120 | 45 | 10.2 | Hip joint module |
| HTR-10-85-A-1 | 85 | 28 | 8.7 | Shoulder or elbow |
| HTR-8-60-C-1 | 60 | 12 | 5.4 | Wrist or neck |
Frameless motors are central to high-torque humanoid designs like Optimus. Their direct-drive nature eliminates backlash, enabling ultra-smooth motion that feels “biological.” Combined with cross-roller bearings, they form joint assemblies capable of handling complex loads while maintaining micrometer-level accuracy.
Gearboxes: Translating Speed into Strength
Raw motor torque is insufficient for human-scale motion it must be amplified and regulated through gear systems.
In humanoid robotics, engineers typically rely on planetary gear systems and harmonic drive gearboxes, each offering unique advantages.
Planetary gearboxes are valued for their torque density, compact symmetry, and durability. The multiple planet gears distribute load evenly, reducing wear and providing exceptional stiffness.
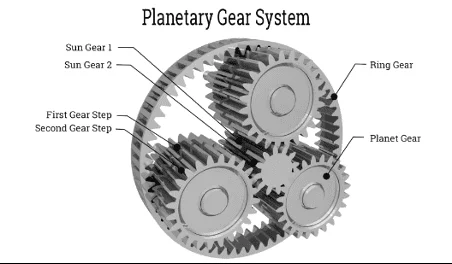
This architecture allows humanoid robots to maintain balanced torque distribution even under asymmetric loads, a critical factor for stable locomotion and manipulation tasks.
3.1 Planetary Gear Systems for Robots
Planetary gearboxes are valued for their torque density, compact symmetry, and durability. The multiple planet gears distribute load evenly, reducing wear and providing exceptional stiffness.
They are used in primary torque amplification stages, such as leg joints and waist rotation, where power must be transmitted efficiently with limited backlash.
| Model | Ratio | Max Torque (Nm) | Efficiency | Application |
| PG-60-10-56 | 56:1 | 40 | 92% | Shoulder/waist |
| PG-42-8-36 | 36:1 | 18 | 90% | Elbow or knee |
| PG-28-6-24 | 24:1 | 5 | 88% | Hand or gripper |
Planetary gear systems serve as the foundation of power transmission, and when paired with harmonic stages, they achieve unmatched balance between rigidity and responsiveness.
Harmonic Drive Gearboxes: Precision Redefined
For joints that require extreme precision, like wrists, ankles, or fine manipulators, engineers turn to harmonic drive gearboxes.
These gearboxes rely on elastic deformation rather than rolling contact, achieving near-zero backlash and extraordinary torque-to-weight ratios.
| Model | Reduction | Rated Torque (Nm) | Outer Diameter (mm) | Typical Use |
| CSF-14-80-2UH | 80:1 | 58 | 85 | Wrist/ankle joints |
| CSD-17-100-2A-GR | 100:1 | 95 | 105 | Hip or shoulder joints |
| CSG-20-120-2UH | 120:1 | 120 | 125 | Core actuation modules |
The Harmonic Drive® principle allows humanoids to maintain precise balance and stability — as seen in Atlas performing dynamic jumps and landings.
The smooth, elastic transmission characteristic reduces vibration and mechanical noise, enhancing both efficiency and human-safe motion.
Bearings: The Hidden Backbone of Motion
In robotics, precision bearings are the quiet heroes. Every motor and gearbox relies on them to maintain alignment and absorb loads while minimizing friction.
Humanoid robots introduce complex stress profiles: simultaneous radial, axial, and moment loads under constant motion. The right bearing choice determines not only mechanical life but also motion accuracy.
Common Bearing Solutions for Humanoid Robots
| Bearing Type | Part Example | Primary Function | Typical Application |
| Cross-Roller Bearing | RB9016UUCC0 | Handles combined axial & radial loads | Hip and knee joints |
| Thin-Section Bearing | KA045XP0 | Minimizes weight, supports high-speed rotation | Wrist and hand joints |
| Angular Contact Bearing | 7005C | Dual-direction load handling | Gearbox integration |
| Thrust Bearing | FT12X28X8 | Axial load compensation | Elbow and shoulder modules |
A humanoid robot like Optimus may contain more than 40 precision bearing sets, each tailored for its motion profile.
At PIB Sales, we work with OEMs to define the right bearing material, lubrication, preload, and tolerance class, ensuring maximum performance with minimal wear.
Engineering Integration: Sensors and Feedback
Every actuation system depends on sensors to achieve closed-loop control.
High-resolution encoders, torque sensors, and temperature monitors form a feedback network that ensures humanoids can adapt to environment and load conditions dynamically.
Modern joint modules often integrate:
- Dual encoders for both motor and output shaft position
- Torque sensors to manage compliance and safety
- Temperature and current monitors for continuous health tracking
This integration allows robots to execute smooth, controlled movements even in variable environments, a fundamental factor in human-safe automation.
Atlas – Dynamic Control and Load Management
Atlas employs servo-driven actuators with harmonic drives in nearly all joints, achieving high responsiveness and stability.
Its success depends heavily on cross-roller bearings and frameless torque motors, which manage load distribution and damping during acrobatic motion.
Optimus – Modular Design for Manufacturability

Tesla’s Optimus adopts a modular joint architecture, integrating frameless torque motors and harmonic drive gearboxes in every actuator. This approach simplifies maintenance, reduces wiring complexity, and enhances part interchangeability — an efficiency driven by component selection.
Zhiyuan RAISE A1 – Innovation in Materials and Mechanics

This Chinese humanoid integrates liquid metal alloys in joint actuators while retaining classic planetary gear systems and thin-section bearings. Its combination of flexibility and rigidity highlights the importance of well-sourced precision components.
Engineering Selection: Building for Performance
Selecting the right components for humanoid robotics is an engineering balancing act. Every design decision, from bearing preload to harmonic ratio, shapes motion fidelity and system lifespan.
At PIB Sales, our engineers help design teams analyze:
- Torque and load profiles
- Duty cycles and temperature curves
- Backlash tolerance and stiffness requirements
- Envelope and mounting geometry constraints
We collaborate from early prototyping through mass production, ensuring every bearing, gearbox, and actuator performs as designed, not just as specified.
Pacific International Bearing Sales is more than a supplier — we are a technical partner to robotics innovators worldwide. We specialize in sourcing and customizing precision bearings, harmonic drives, frameless torque motors, planetary gear systems, and integrated robot joint actuators from globally trusted manufacturers.
What sets PIB Sales apart:
- Application engineering support for custom joint designs
- Verified performance data and CAD-compatible models
- Rapid prototyping and sourcing options
- Engineering traceability and quality documentation
Our customers rely on us because we speak the language of mechanical design. We understand torque ripple, preload optimization, and heat dissipation, not just catalog numbers.
Conclusion: Precision Creates Personality
Every human-like motion in robotics, a smooth step, a balanced stance, or a delicate grip, is the result of hundreds of mechanical interactions working in harmony.
Precision bearings keep those motions stable. Harmonic drive gearboxes make them controllable. Frameless torque motors make them powerful.
At Pacific International Bearing Sales, we believe the soul of humanoid robotics is mechanical precision, and it begins with the right components.
If you’re designing advanced actuation systems or robotic platforms, let’s engineer the future together.
Contact us: [email protected]
Visit: www.pibsales.com