Your cart is empty










 Short Rigid Couplings
Short Rigid Couplings Controlflex Couplings
Controlflex Couplings Jaw Couplings
Jaw Couplings Oldham Couplings
Oldham Couplings Bearing Locknuts – TCN
Bearing Locknuts – TCN Double Wide Shaft Collars
Double Wide Shaft Collars Heavy Duty Shaft Collars
Heavy Duty Shaft Collars International Series Shaft Collars
International Series Shaft Collars Keyed Shaft Collars
Keyed Shaft Collars Mountable Shaft Collars
Mountable Shaft Collars Quick Clamping Shaft Collars
Quick Clamping Shaft Collars Set Screw Shaft Collars
Set Screw Shaft Collars Thin Line Shaft Collars
Thin Line Shaft Collars Threaded Shaft Collars – Pacific International Bearing Products
Threaded Shaft Collars – Pacific International Bearing Products Two-Piece Shaft Collars
Two-Piece Shaft Collars Friction Bearing Universal Joints
Friction Bearing Universal Joints Needle Bearing Universal Joints
Needle Bearing Universal Joints
Bearings
Humanoid Robotic Knee and Ankle Pivot Bearings
13 April, 2026
21 min read
Pacific International Bearing Sales helps robot engineers select knee and ankle pivot bearings by matching real joint loads to the right bearing stack, duplex angular contact, 4‑point, thin‑section, crossed‑roller, or spherical/rod‑end. Many of these applications require tighter clearance, controlled preload, durable lubrication and sealing, and mounting fits that keep the joint quiet, efficient, and repeatable.
Key Takeaways (why this article is worth your time)
- Knee/ankle pivots are load‑bearing joints for bipedal locomotion, and the “feel” of the robot (quietness, smoothness, precision) is heavily influenced by bearing clearance, torque, and sealing choices.
- For pivot joints, you’re rarely choosing a single bearing—you’re choosing a bearing stack that can handle Fr + Fa + M (Fr radial load, Fa axial thrust load and M moment load) without turning into backlash (play) or turning into drag (high torque).
- Crossed‑roller bearings are a common “one bearing, many loads” answer in rotary actuators, while 4‑point contact bearings show up as compact input bearings; duplex angular contact pairs are the workhorse when you want tunable stiffness via preload.
- Seals protect and retain lubrication, but they add torque—so sealing and lubrication must be calculated and designed with this in mind.
Knee and ankle joints don’t just rotate, they carry weight, absorb step impacts, and fight tilting moments as the center of mass shifts. That’s why bearing selection in these joints is about controlling stiffness (to prevent wobble), friction torque (to prevent energy waste), and survivability (to prevent dirt + lubricant loss).
A practical way to think about pivot bearings is: the actuator creates motion, but the bearing stack defines the joint’s mechanical integrity.. If the stack has too much clearance, you get motion transfer delay and jerky movement; if the stack is over‑preloaded or over‑sealed, you get high torque and higher power consumption. Clearance drives delays/inaccuracy and shake/rattle, while torque must be managed because excessive torque increases power consumption and too little torque can imply too much clearance.
Important note: your exact robot mass, peak pivot loads, duty cycle, and target IP rating are unspecified. That’s normal at the concept stage. This article treats knee/ankle pivots as combined‑load joints and shows what to request so PIB can help narrow to the right bearing.
Knee and Ankle Pivot Loads: Fr, Fa, and Tilting Moment are Always in the Room
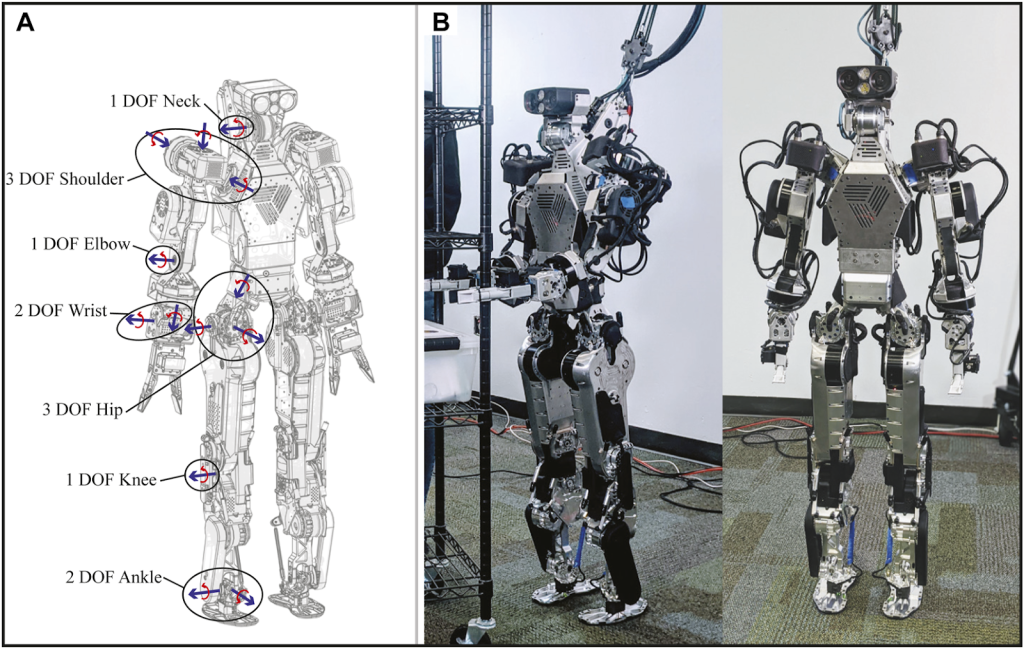
NMB’s humanoid robotics bearing overview calls out knee and ankle pivots as load‑bearing joints for bipedal locomotion. That load‑bearing joint cannot loosen, rattle, or drag over time.” Internal clearance (play) can cause motion transfer delays and reduced accuracy —showing up as shaky/jerky movement and rattling noise due to vibration. Selecting the correct clearance is critical.
On the load side, you should assume three components will be present—often simultaneously:
- Fr (radial load): what most engineers picture first (weight and side forces).
- Fa (axial/thrust load): appears quickly in real gait because foot contact isn’t perfectly aligned to the pivot axis, and because gear stages and couplings introduce axial components.
- M (tilting moment / overturning moment): the knee and ankle see moment loads when the line of action shifts from the pivot axis (think: stepping, turning, recovering balance). Crossed‑roller bearings are often specified because they support axial loads (both directions), radial loads, and tilting moment loads, and are commonly used as the output bearing in rotary actuators.
And then there’s a fourth “load” that isn’t in your FEA plot: perception. NMB points out that humanoid robots often operate quietly in public/domestic environments, and poor‑quality bearings can introduce vibration, noise, and uneven resistance. So, in a humanoid, a bearing problem becomes a product problem fast.
Bearings that Actually Make Sense in Knee and Ankle Pivots
The bearing types below show up repeatedly in humanoid joint discussions because they map well to the combined‑load pivot problem either by handling multiple load components in one package, or by enabling alignment/misalignment where gait demands it.
Crossed‑roller bearings for high stiffness under combined loads
If you need one compact bearing element that can carry radial + axial (both directions) + moment, crossed rollers are a top candidate. Compact, precise, low‑friction‑torque bearings used as the output bearing in rotary actuators, supporting combined loads including tilting moments.
PIB’s humanoid motion systems content gives a concrete example of the kind of selection variables you’ll often see on crossed rollers: in an IKO crossed‑roller context, PIB lists shaft diameter ranges (CRBFV 35–115 mm; CRBHV 30–250 mm), seal options, accuracy classes (P2 to P6), dynamic/static load support (up to 240/490 kN for CRBFV; up to 320/620 kN for CRBHV), and preload variations (T1, C1, C2).
That last part — preload classes — matters because stiffness is only “real” if your assembled clearance is controlled.
Four‑point contact bearings as compact combined‑load pivot elements
Four‑point contact bearings are popular because they handle a combination of radial and axial loads in both directions in a compact package. Tech sources call them versatile, compact, and cost‑effective, and specifically notes an actuator interface pattern: four‑point contact bearings are used as the input bearing in rotary actuators.
In thin‑section form, PIB notes that four‑point contact thin‑section bearings (often called X‑type) can be engineered to manage radial, axial, and moment loads simultaneously when there isn’t space for multiple bearings — common in robotics and turntable mechanisms.
Duplex angular contact bearings when you want tunable stiffness via preload
Angular contact ball bearings (ACBBs) SKF brand are a classic combined‑load tool: a single ACBB handles axial thrust from one direction while still carrying radial load, due to its contact angle geometry.
But knee/ankle joints reverse direction and load. That’s why ACBBs are “usually used in pairs” to allow bidirectional axial load capability , and PIB echoes how ACBBs support thrust in one direction and are commonly paired for dual direction needs.
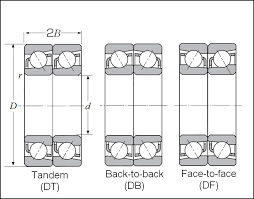
This is where duplex configurations are practical engineering, not theory. PIB explicitly notes that angular contact bearings can be mounted back‑to‑back for greater moment rigidity, or face‑to‑face for better accommodation of misalignment—and that preload selection must balance stiffness versus bearing life.
If your knee pivot is struggling with “softness” (deflection under moment) but you don’t want the complexity or cost profile of a crossed roller, a duplex ACBB stack is often the middle ground—especially when you can factory‑set or shim to a light preload target and keep friction manageable.
Thin‑section bearings when packaging and weight win the argument
PIB’s thin‑section guidance is very direct: high‑performance joints for robots and prosthetics need power and precision without bulk, and thin‑section bearings are positioned as an ideal solution for actuating joints including elbows, knees, and wrists.
Thin‑section is not one bearing type — it’s a packaging strategy. PIB breaks it into common configurations (radial deep groove thin‑section, angular contact thin‑section, and four‑point contact thin‑section/X‑type).
On size expectations, PIB notes that bore diameters can range from a few millimeters (instrumentation) to several inches (larger robotics/aerospace), and provides concrete examples like 4×9×4 mm, 8×19×6 mm, and 20×32×7 mm in a thin‑section context.
Thin‑section bearings often show up in ankle modules when you’re designing in a small envelope, or in knees where you want to keep distal mass down (less weight “at the foot” typically helps control). Even if you ultimately choose crossed rollers for the main axis, thin‑sections may still appear on secondary joints, idlers, or sensor/encoder supports.
PIB offers RBC and Kaydon Thin section bearing brands from stock.
Spherical plain bearings and rod ends when misalignment is part of the design
If your joint needs to tolerate misalignment (or your linkage geometry creates it), spherical plain bearings (SPBs) and rod ends can be considered..
Spherical plain bearings are critical in humanoids and can be found in rod end and linkage assemblies. Often they are designed with a spherical plain bearing at each end to permit misalignment.
Machine Design goes deeper in a way that’s useful for spec decisions:
- Metal‑to‑metal SPBs are robust for high‑impact loads but have larger initial clearance compared to self‑lubricating SPBs.
- Self-lubricating SPBs with PTFE‑based liners offer low friction, maintenance‑free operation, and even negative clearance capability.
Rod ends are essentially a packaging of that spherical interface into a mountable linkage component. For example, PIB’s SFE8 PDF describes an 8×22×12 mm metric spherical plain rod end, right‑handed female, self‑lubricating.
Full‑complement cylindrical roller bearings when you need heavy load in a compact package

Full‑complement rollers are often overlooked in “robot joints” conversations, but they show up in actuator internals and heavily loaded sections.
SKF and Schaeffler Bearing Companies both manufacture bearings (full complement cylindrical roller bearings) as heavy‑load, compact bearings that reduce oscillation in robotic actuators and improve control/rigidity, while also offering low noise and vibration — making them a fit for rotary actuators and linkage assemblies. That combination — compact + heavy load + lower oscillation — is exactly what you care about in knee modules where control stability matters under changing loads.
Both SKF and Schaeffler brands can be purchased from PIB , an authorized Distributor.
Clearance vs Preload: Where Smooth Walking Comes From
If you’ve ever watched an early humanoid demo and thought “the gait looks slightly nervous,” there’s a fair chance clearance control was part of the story. Clearance/play causes motion transfer delays, imprecise positioning, reduced accuracy, and visible shaking/jerky motion; too much clearance also accelerates wear and creates rattling noise from vibration.
At the same time, you can’t solve everything by adjusting the preload.” So what does this mean for knee and ankle pivots?
You set a target for joint behavior, then pick how you’ll achieve it:
- Zero/near‑zero backlash behavior: PIB’s motion component partner guidance says backlash can be virtually eliminated by using preloaded or tight‑clearance bearings—citing examples like selecting tight‑clearance crossed rollers or using shims to induce light preload; crossed rollers are often available in slight preload classes to achieve zero clearance.
- Predictable friction torque: choose the bearing family and sealing strategy together, because seals can add torque.
- Mounting‑achievable preload: PIB’s angular contact guidance emphasizes that the assembled clearance/preload depends on fits and mounting configuration; too little preload allows deflection, too much shortens life.
A useful mental model is: clearance lives at the bearing scale, but the consequences live at the gait scale. You don’t notice 20 µm in a spreadsheet; you notice it when an ankle pivot “clicks” on a direction change, or when the knee looks hesitant under load.
Lubrication, Sealing, Materials, Mounting Fits, and Actuator Interfaces
As in any application for bearings determining fits, lubrication types and seal types are essential to the success of the bearing life.
Lubrication and sealing: keep dirt out, keep lubricant in but must be considered how it affects torque
NMB’s humanoid bearing article emphasizes an extended lifecycle via advanced lubrication and sealing options, and notes that engineers work on preload and lubrication formula selection for the use case.
But seals can create torque.Seal lip designs (single/double/triple) and interference/contact control are used to limit the introduced torque.Shields and non contact seals are often specified to lessen torque.
This is where PIB’s configuration language is helpful: WIB brand ACBBs can be supplied open (max speed), shielded, or sealed; contact/low‑contact seals protect in humid/dirty environments, while non‑contact metal shields protect with minimal speed reduction.
Materials: corrosion, noise, insulation, and speed
For knee/ankle pivots, material choices are often driven by environment (humidity, cleaning agents), wear risk, and sometimes electrical concerns (motors/sensors nearby).
PIB’s angular contact overview lays out practical material/configuration levers: high‑grade stainless steels (rings), common steels like 52100 or 440C for rings/balls, hybrid designs with ceramic (silicon nitride) balls for higher speed/low friction, polymer cages for lighter/quieter behavior, and special coatings (anti‑corrosion, dry film lubricants, or application‑specific coatings).
NMB similarly calls out customizable materials for corrosion or electromagnetic resistance as part of their differentiators, which aligns with the reality that humanoids often bring bearings close to sensitive electronics.
Mounting and fits:
PIB’s engineering advises close consideration be given for mounting and fitments for bearings in robotic applications. Below are some listed types of bearings and applications for robots.
- Crossed rollers are commonly used as the output bearing in rotary actuators; four‑point contact bearings can be used as the input bearing in rotary actuators.
- Flexible ball bearings are used in wave generators of harmonic drive mechanisms (they deform into an oval shape under cam action). Even if flexible bearings aren’t the knee pivot bearing, they can be part of the same actuation module that feeds the knee/ankle, affecting how loads enter the pivot stack.
- PIB’s strain wave gear discussion notes Schaeffler uses tilt‑resistant double‑row angular contact ball bearings (XZU) in precision strain wave gears, and those bearings outperform crossed roller bearings of the same size by ~30% in tilting rigidity—an actuator‑module pointer that “bearing choice is part of gearbox choice,” not an afterthought.
Finally, don’t ignore couplings. PIB’s partner guide ties backlash elimination to using preloaded/tight‑clearance bearings and also emphasizes zero‑backlash couplings; sloppy drivetrain connections can re-introduce “play” .
Spec comparison table: what to pick, why, and what to request
| Bearing type | Typical use (knee/ankle context) | Strengths | Limits | Key spec fields to request from PIB |
| Crossed‑roller | High‑stiffness knee pivots; actuator output bearings where Fr/Fa/M are all significant | Supports axial (both directions), radial, and tilting moment; compact; low friction torque/clearance; high accuracy; often available in preload/negative clearance variants | Sensitive to housing/fit quality; sealing targets (IP) and preload strategy matter | Fr/Fa/M, required stiffness/deflection, bore/OD/width, preload class (or target assembled clearance), seals/IP target, lubrication life target, accuracy class |
| Four‑point contact | Compact pivot joints; actuator input bearings; space‑limited combined‑load points | Combined radial + axial (both directions); compact and described as cost‑effective; some designs allow larger contact angle via split rings for more axial/moment load | Fit and geometry still matter; may not match crossed‑roller stiffness for high moment demands | Fr/Fa/M, bore/OD/width, ring configuration (split or not), clearance/preload target, seals, lubrication type and fill, mounting constraints |
| Duplex angular contact (ACBB pair) | Knee pivots and actuator shafts needing tunable stiffness; bidirectional thrust handling | Handles combined loads; pairs provide bidirectional thrust; back‑to‑back increases moment rigidity; preload options (light/med/heavy) are a controlled stiffness tool | Single ACBB handles thrust mainly one direction; over‑preload increases torque and can reduce life | Fr/Fa/M + thrust direction(s), contact angle, DB/DF orientation, preload level, bore/OD/width, seals/shields, lubrication, fit class for shaft/housing |
| Thin‑section (radial / angular / X‑type) | Weight and envelope‑limited ankle modules; compact knee designs; secondary axes around the pivot | Saves bulk; available as radial, angular contact, or four‑point contact X‑type; bores from a few mm to several inches; useful where multiple bearings won’t fit | Lower cross‑section can limit ultimate stiffness vs larger bearings; needs honest load inputs to avoid early wear | Bore/OD/width, type (radial/AC/X), Fr/Fa/M, stiffness target, lubrication, sealing, material/corrosion need |
| Spherical plain (SPB) | Ankle misalignment tolerance; linkage endpoints in leg mechanisms | Manages misalignment; self‑lubricating PTFE liners can be low friction, maintenance‑free, and even negative clearance capable | Metal‑to‑metal versions can have larger initial clearance; generally not for high RPM rotation | Misalignment angle, load directions, liner choice (PTFE vs metal‑to‑metal), environment/contamination, maintenance intent |
| Rod ends | Packaging SPB into a mountable linkage part (dog‑bone style); ankle linkages | Simple integration; handles misalignment; can be self‑lubricating (example below) | Life depends on dirt control and articulation range; needs correct sizing and mounting brackets | Thread direction/size, bore/ball size, misalignment, load, self‑lubricating requirement, corrosion needs |
| Full‑complement cylindrical roller (RNN) | Compact heavy‑load zones inside actuators; rigidity/control improvement under load | Heavy loads in compact design; reduces oscillation; improves control and rigidity; low noise/vibration described | Lubrication and contamination control are critical; not a “one bearing does everything” pivot solution alone | Load and duty cycle, lubrication strategy, contamination/seal plan, envelope constraints, fits |
Example spec lines: three real PIB items you can use as anchors
| PIB example item | Bearing type (pivot relevance) | Nominal size | Notes that matter for humanoid pivots | Source |
| SFE8 | Spherical plain rod end (linkage/ankle misalignment) | 8 × 22 × 12 mm | Metric spherical plain rod end; female; self‑lubricating (good for maintenance‑lean linkage endpoints) | PIB PDF spec sheet |
| QJ216‑XL‑N2‑MPA‑C3 | Four‑point contact (compact combined‑load pivot element / actuator input role) | 80 × 140 × 26 mm | Four‑point contact bearing; holding grooves; solid brass cage (a typical “compact combined loads” part class) | PIB PDF spec sheet + product page |
| ZKLDF460‑B | Axial angular contact, double direction (mountable pivot/turntable class) | 460 × 600 × 70 mm | Double direction; screw mounting; sealing shields; axial dynamic/static loads shown (example of “integrated mounting + sealing”) | PIB PDF spec sheet |
FAQ
How do I choose between crossed‑roller vs duplex angular contact for a knee pivot?
If your knee is moment‑dominated (M is big) and you want one bearing to carry combined axial/radial/moment loads with high stiffness, crossed rollers are a common choice in rotary actuators. If you want tunable stiffness via preload and you can package a pair, duplex ACBB stacks give you control through back‑to‑back/face‑to‑face orientation and preload selection—while still handling combined loads.
Why does my ankle “click” or look unstable during direction changes?
Often it’s clearance/play in the bearing stack or drivetrain interfaces. Clearance causes motion transfer delays and reduced accuracy, producing shaking/jerky motion and rattling noise. In ankles, misalignment also matters; spherical plain bearings and rod ends are commonly used in linkages to permit misalignment.
Do seals always help, or do they just add drag?
They help, but they’re not free. Seals prevent contaminants and keep lubrication in; TechBriefs also warns that dust ingress and grease loss can shorten life or cause loss of functionality in bipedal environments. But seals add friction; tighter seals can raise initial torque even though modern designs try to mitigate that. The right answer is usually “seal to the environment, then budget torque accordingly,” not “always max seal.”
What materials should I consider if the robot faces humidity, cleaning, or electronics nearby?
PIB’s angular contact guidance points to stainless options, common bearing steels (52100 / 440C), hybrid ceramic balls (silicon nitride) for speed/low friction, polymer cages for lighter/quieter operation, and coatings for corrosion or wear needs. NMB also highlights customizable materials for corrosion or electromagnetic resistance in robotics contexts.
Use the PIB online catalog to move from “bearing ideas” to real part numbers
When you’re ready to translate joint requirements into real options, the fastest path is the PIB online catalog — you can filter by bearing category (thin section, spherical plain, rod ends, four‑point contact, thrust, etc.) and pull PDF documentation where available.
If you want to make quotes accurate (and make iteration faster), send PIB the spec checklist from Figure 3 and at least one “anchor example” part number (like the four‑point contact QJ216 example or a rod‑end like SFE8) so the team can bracket sizes and mounting strategies quickly.
Contact PIB at 800-228-8895 or send to [email protected]