Your cart is empty










 Short Rigid Couplings
Short Rigid Couplings Controlflex Couplings
Controlflex Couplings Jaw Couplings
Jaw Couplings Oldham Couplings
Oldham Couplings Bearing Locknuts – TCN
Bearing Locknuts – TCN Double Wide Shaft Collars
Double Wide Shaft Collars Heavy Duty Shaft Collars
Heavy Duty Shaft Collars International Series Shaft Collars
International Series Shaft Collars Keyed Shaft Collars
Keyed Shaft Collars Mountable Shaft Collars
Mountable Shaft Collars Quick Clamping Shaft Collars
Quick Clamping Shaft Collars Set Screw Shaft Collars
Set Screw Shaft Collars Thin Line Shaft Collars
Thin Line Shaft Collars Threaded Shaft Collars – Pacific International Bearing Products
Threaded Shaft Collars – Pacific International Bearing Products Two-Piece Shaft Collars
Two-Piece Shaft Collars Friction Bearing Universal Joints
Friction Bearing Universal Joints Needle Bearing Universal Joints
Needle Bearing Universal Joints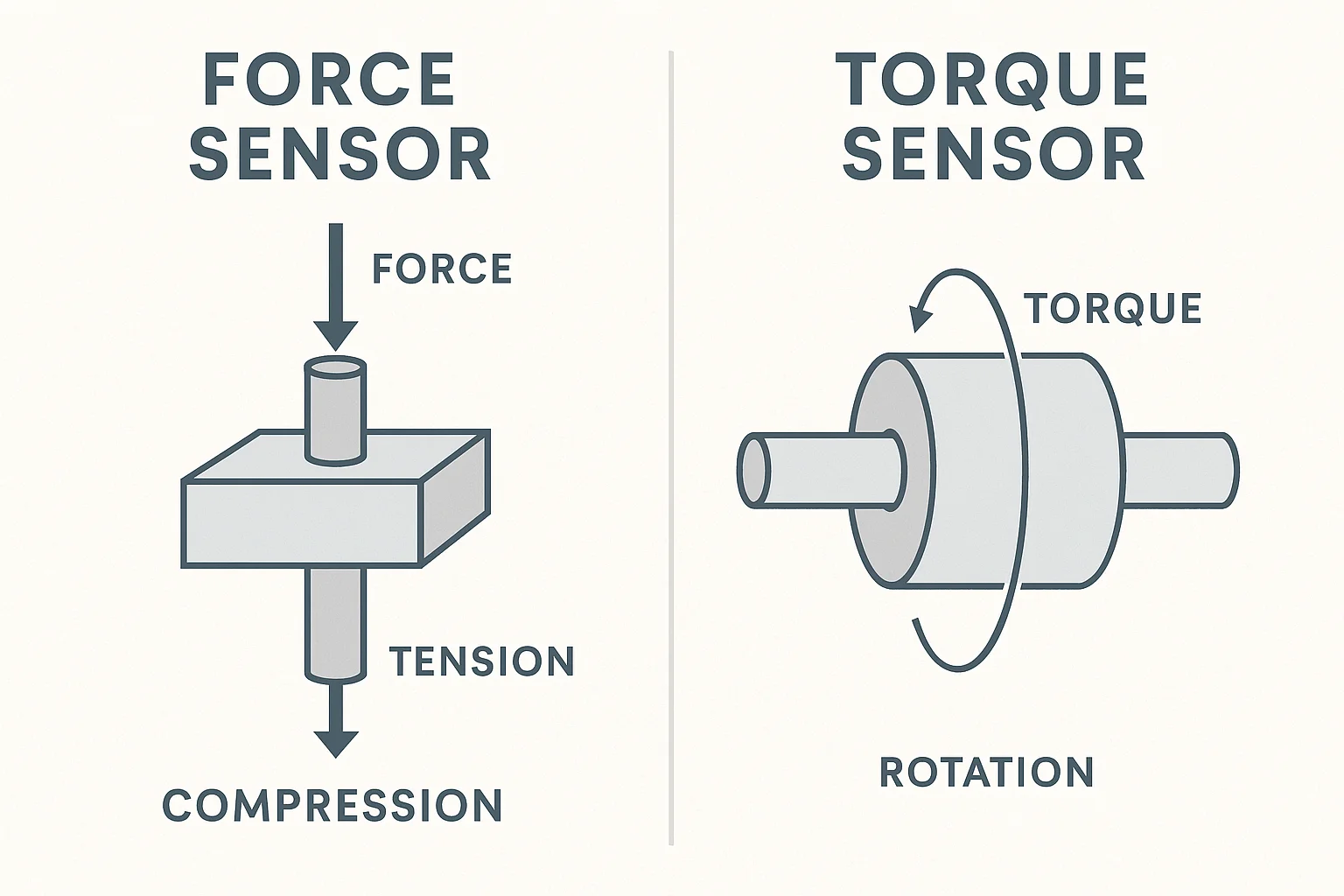
Bearings
Strain Type Sensors for Detecting Load, Joint Feedback, and Limb Tension in Dynamic Environments
22 January, 2026
26 min read
Pacific International Bearing Sales (PIB) offers a broad range of advanced strain-type sensors that give robots and automated machines a much-needed sense of “feel.” Strain-type sensors give robots and automated machines a measurable sense of “feel” by detecting forces and torque in real time.
In this guide, you’ll get a clear definition, key benefits, common applications, typical specs, and a practical selection workflow you can use for real projects.
Let’s break it down in an answer-first, easy-to-scan format.
Quick summary: Strain-type sensors are strain-gauge-based force and torque sensors used to measure loads, joint torque, and limb tension in real time, helping robots control motion precisely, avoid overload, and interact more safely in dynamic environments.
Key takeaway: The value of strain sensing is immediate feedback detecting tiny mechanical deformation and converting it into a usable signal so a control system can react before damage, instability, or unsafe contact happens.
Quick promise: If you match the right sensor type, range, and interface to your robot and environment, strain feedback can improve precision, stability, and reliability, especially in variable, real-world conditions.
Quick Facts — Strain-Type Sensors
- Force/torque sensors built on strain gauge technology
- Detect mechanical strain and output a measurable electrical signal
- Used for load detection, joint torque feedback, and limb tension monitoring
Common in dynamic robotics for safety + precision
| Field | Answer |
| What it is | A force/torque sensor that uses strain gauges to detect tiny deformation under load. |
| Who it’s for | Robotics, automation, and machine builders needing real-time force/torque feedback. |
| Best for | Load detection, joint feedback for precise control, and monitoring limb tension/stability. |
| What you get / output | A measurable signal proportional to force or torque (often low-level analog or digital). |
| How it works (high level) | Strain gauges change electrical resistance when stretched/compressed; electronics convert that into an output signal. |
| Common sensor forms | Load cells, joint torque sensors (flange/shaft), and multi-axis force/torque sensors (6 DOF). |
| Signal types | Raw strain gauge bridge (e.g., ~mV/V), amplified outputs (0–5V, 4–20 mA), or digital bus (varies by model). |
| Typical ranges (examples) | Load cells: 0–500 N up to several kN; joint torque: a few N·m to 500+ N·m; multi-axis: small sensors around ±50 N & ±5 N·m (larger units higher). |
| Risks / limitations | Wrong range or weak environmental protection can reduce reliability; many setups require amplification/signal conditioning. |
| Common mistakes | Underspec overload margin, ignoring sealing needs (dust/coolant/water), or choosing an interface that’s hard to integrate. |
| Alternatives | Position-only sensing can’t directly measure force/torque; other methods exist but depend on the application. |
| Quick tip | Choose a sensor range with safety overhead above expected peak loads, not just “normal” loads. |
What Are Strain Type Sensors?
A strain-type sensor is a force and torque sensor built on strain gauge technology that detects tiny mechanical deformation and converts it into a measurable electrical signal.
What it includes / key components:
- Strain gauge(s): tiny flexible circuits that change electrical resistance when stretched or compressed
Bonded mechanical element: typically a metal component that deforms slightly under load - Measurement bridge + electronics: converts deformation into an output signal
- Output interface: often low-level analog voltage or a digital reading (varies by model)
Who it’s for:
- Robotics systems needing force/torque feedback for control
- Automated machines where overload protection matters
- Applications monitoring structural strain or limb tension
Who it’s not for:
- Projects that only need position feedback and don’t care about force/torque interaction
- Setups where no sensor mounting space or integration path exists (unless redesigned)
Strain-type sensors come in multiple forms load cells (straight-line force), torque transducers (twisting force at joints), and multi-axis force/torque sensors that capture complex 3D forces.
Strain Sensors in Dynamic Robotics
Dynamic, real-world environments present constantly changing forces. Robots need to sense these forces to react appropriately. Strain sensors provide exactly that feedback. Consider a humanoid robot walking across uneven terrain. Each step puts a different load on its legs and spine. Without strain sensors, the robot might unknowingly overstress a joint or structure. With sensors embedded at key points (for example, in knee joints or along load-bearing frame sections), the robot can detect a spike in strain as soon as it happens. If one step causes an excessive load, the control system gets that feedback immediately and can adjust the robot’s posture or issue an alert before a failure occurs. The result is a robot that can keep its balance and protect itself, even in chaotic conditions.
Another example: take an industrial robotic arm performing repetitive assembly tasks all day. Over time, even small stresses from thousands of cycles can accumulate as fatigue in the arm’s materials. Strain sensors continuously monitoring the arm’s structural strain can reveal subtle trends – perhaps a certain joint is gradually experiencing higher strain as a part wears out. With this data, maintenance teams can predict material fatigue and service the robot on schedule, rather than waiting for something to break. This kind of predictive maintenance, enabled by strain sensors, means higher operational uptime and fewer surprises on the factory floor. In essence, the robot becomes smarter about its own health.
Finally, strain sensors allow robots to interact more delicately and safely with their environment. A collaborative robot (cobot) working alongside humans might use high-sensitivity strain gauges in its limbs to sense contact. If the robot’s arm brushes against an unexpected obstacle (say a person’s arm or any object), even a slight increase in strain is detected instantly. The control system can pause or adjust motion in milliseconds, preventing an accident. This responsive behavior is only possible because the robot is “feeling” the forces in play through its strain sensor network. In dynamic settings, from busy factory floors to unpredictable outdoor terrain, this feedback is indispensable for both safety and precision.
Key Features and Benefits of Strain-Type Sensors
Modern strain-type sensors for load and torque measurement are engineered with capabilities that make them ideal for dynamic applications:
- High Sensitivity: They can detect extremely small deformations (microstrains), allowing robots to sense minor changes in load or tension. This is crucial for delicate tasks like holding a fragile object or making fine force adjustments.
- Compact and Flexible Form Factors: Strain sensors can be designed in many shapes and sizes – thin films, small load pins, ring-shaped torque flanges, etc. They integrate into joints, linkages, or structural surfaces without adding bulk or altering the mechanism’s design. This means a sensor can be embedded inside a robot’s wrist or a prosthetic limb’s structure seamlessly.
- Real-Time Output for Control: Most strain sensors provide real-time analog signals (millivolt-level outputs from a strain gauge bridge) or digital outputs that update continuously. They interface with standard robot controllers or PLCs easily (often via an amplifier or signal conditioner), enabling immediate feedback loops. The robot’s control system can read forces on the fly and adjust motor inputs in a split second – critical for active balance and force control.
- Rugged and Reliable: Strain gauge sensors are built to withstand the rigors of dynamic environments. They are often made from durable metals (like stainless steel or high-strength aluminum) to endure repeated loading. Quality sensors feature overload protection, meaning they can survive loads beyond their normal rating (often 150% of full scale or more) without damage. Many are also sealed against dust, coolant, or moisture ingress (e.g., IP65 or IP67 ratings), ensuring consistent performance on factory floors or outdoor conditions.
- Stable and Low Drift: Advanced strain sensors are temperature compensated and carefully engineered to avoid drift. They maintain accuracy over a wide temperature range and over long periods of use. For the end user, this means less frequent recalibration and confidence that the sensor’s readings today will match those from last month. Stability is especially important in scenarios like medical or aerospace applications where sensor recalibration opportunities are limited.
Together, these features translate into tangible benefits. A robot with good strain feedback can apply just enough force – for example, tightening a bolt with a torque sensor ensures it’s neither too loose nor over-torqued. A sensor-equipped system can also operate closer to its performance limits with confidence, because it’s constantly self-monitoring strain and can pull back if needed. Overall, strain-type sensors make machines more intelligent, safer, and more capable in dynamic tasks.
Applications: Load Detection, Joint Feedback, and Limb Tension
Strain-type sensors find use anywhere we need to measure forces or moments in a structure. Here are some of the key application areas and why they matter:
Detecting Loads and Preventing Overload: One fundamental use of strain sensors is measuring loads – whether it’s the weight a robot arm is lifting or the force on a leg during locomotion. By detecting load, a sensor ensures motors are not over-exerted and structural limits aren’t exceeded. For instance, an autonomous warehouse robot with built-in load cells can tell if it has picked up a package that’s too heavy and adjust its speed or path to compensate. In construction robotics or exoskeletons, load sensing guarantees that weight is distributed safely, protecting both the machine and the operator. The ability to detect load in real time means dynamic systems can automatically prevent overload conditions that would otherwise cause wear or sudden failure.
Joint Torque Feedback for Precision Control: Strain gauge-based torque sensors are often integrated into robotic joints (like elbows, knees, or robot wrists). These sensors measure the twisting force at the joint and provide feedback to the control system. Why is this important? Because with accurate joint torque feedback, a robot can perform force-controlled actions and delicate movements that would be impossible with just position sensors. For example, a robot arm assembling a delicate component can use torque feedback to tighten a part just until a specific torque threshold is reached, ensuring consistency. Joint feedback is also vital for collision detection and compliant motion – if the joint feels an unexpected torque (as when bumping into something), the robot can stop or back off immediately. In humanoid robots and animatronics, joint torque sensing allows smoother, more human-like movements by blending position commands with force feedback (much like our muscles sense tension to coordinate movements). Overall, torque feedback from strain sensors gives robots a finer level of control and awareness in every motion.
Monitoring Limb Tension and Stability: In dynamic robotic limbs – whether it’s the arm of a humanoid, the leg of a quadruped robot, or even a wearable exoskeleton – maintaining proper tension and load distribution is key to performance. Strain-type sensors can be placed in links or connecting elements of a limb to monitor tension forces continuously. Imagine a robotic leg that uses an array of strain sensors along a “tendon” element: as the robot walks or jumps, these sensors measure the tension in that limb in real time. The control system can use this information to adjust actuator outputs, dampen oscillations, or redistribute loads to other limbs. This is essential for dynamic balancing and smooth locomotion. In the case of prosthetic or rehabilitation devices for humans, limb tension sensors ensure that the device is providing the right amount of support – not too slack and not too stiff – adapting on the fly to the user’s movement. Monitoring limb tension also improves safety; if one limb of a robot suddenly takes a load it shouldn’t (say one leg of a robot slips or a human wearing an exoskeleton stumbles), the sensors detect the spike in tension and trigger corrective action instantly. Through continuous tension monitoring, strain sensors help maintain stability and responsiveness in every limb of a dynamic system.
Types of Strain Sensors and Specifications
Because “strain type sensor” is a broad term, it’s helpful to know the different types of sensor solutions available and their typical performance. PIB provides various sensor designs to meet different needs – from measuring a simple pulling force to capturing multi-axis forces in a robotic wrist. Below is a summary of common strain-based sensor types and their typical specifications:
| Sensor Type | Measurement Range | Accuracy | Output Signal | Overload / Protection |
| Load Cell (Force Sensor) – measures tension/compression forces in one axis. | Varies by model, e.g., 0–500 N (up to several kN for larger load cells). | ±0.1% of full scale (FS) typical non-linearity. Highly repeatable (±0.05% FS). | Analog strain gauge bridge (e.g,. ~2 mV/V output at capacity). Digital output is available on some models with built-in amplifiers. | Safe overload ~150% FS (ultimate >200% FS). Commonly IP65 or higher (sealed against dust and splashes) for industrial use. |
| Joint Torque Sensor – a flange or shaft sensor for rotary torque at robot joints. | Ranges from a few N·m up to 500+ N·m, depending on robot size. For example, 0–100 N·m in a compact flange design. | ±0.2% FS typical accuracy (non-linearity), ±0.1% FS hysteresis. Designed for low drift over temperature. | Analog strain gauge output (~1.0–1.5 mV/V) requiring an amplifier. Some offer amplified 0-5V, 4-20 mA, or digital bus output for direct PLC interface. | Safe overload ~120–150% FS (200% ultimate) with built-in mechanical stops. IP66/IP67 sealing on many models to withstand factory environments (dust, oil). |
| Multi-Axis Force/Torque Sensor – measures forces in 3 axes (X, Y, Z) and torques about those axes (6 DOF total). Often used in robot wrists or ankles. | Each axis has its own range, e.g., ±50 N per linear axis and ±5 N·m per torque axis in a small sensor. Larger units handle up to hundreds of N and tens of N·m. | ±1% FS on all axes (with cross-axis coupling often <±2% FS). High-end models achieve <±0.5% FS. Calibration ensures accuracy for all 6 components. | Typically digital output (via embedded electronics) – options include EtherCAT, Ethernet/IP, USB, or CAN. Some models output raw analog signals per strain gauge bridge (requiring multi-channel instrumentation). | Typically 200% FS overload per axis without damage. Many are IP65+ rated (some even IP67) with hardened covers to protect against impacts. High stiffness designs minimize deflection under full load. |
Table: Examples of strain-gauge-based sensor types and their typical specifications. Individual products may vary; consult the PIB online catalog for detailed specs on specific models.
As the table suggests, selecting the right strain sensor involves matching the sensor’s design to your application’s needs. Load cells are ideal for straight-line force measurement, such as weighing, tension pulling, or support force monitoring. Torque sensors are specialized for rotational force – perfect for joint feedback or motor shaft output monitoring. Multi-axis sensors provide a comprehensive force/torque picture in applications like force-controlled assembly, haptic feedback interfaces, or balance control in legged robots. Despite their differences, all of these use strain gauge technology as the underlying principle, so they share traits of accuracy, fast response, and robust construction.
When choosing a strain sensor, consider factors like the maximum force/torque it will need to measure, the space available for mounting, environmental conditions (does it need water-proofing or heat resistance?), and what interface is easiest for your control system. PIB’s experts can help recommend a sensor with the right capacity and features – whether it’s a standard off-the-shelf unit or a custom-designed sensor for a unique project.
Explore the PIB online catalog to see our full range of strain-type sensors and related measurement components. From high-precision load cells to compact multi-axis sensors, Pacific International Bearing Sales has solutions to equip your robots and machines with the “sixth sense” of force feedback. If you’re looking to enhance safety, improve control accuracy, or gather better data from your system, our catalog is a great place to start – and our engineering team is always ready to assist with expert guidance on sensor integration.
Why do people use strain-type sensors
People use strain-type sensors because they add real-time physical feedback that improves control, safety, and machine awareness.
- Precision: enables fine force control where position-only sensing isn’t enough
- Protection: helps detect overload early and reduce damage risk
- Stability: supports balance and posture adjustments in changing conditions
- Predictive maintenance: continuous strain monitoring can reveal trends tied to wear/fatigue
- Safer interaction: fast detection of unexpected contact enables rapid motion adjustment
Shortcut: If your system needs to “feel” load changes (not just move to a position), you likely need strain-based force/torque feedback.
What to expect (results, timeline, or outcome)
You can expect immediate (real-time) feedback on load/torque changes, which a control system can use to adjust behavior quickly—up to pausing or changing motion in milliseconds in responsive setups.
Typical outcome pattern:
- As load changes: sensor detects strain spikes as soon as they occur
- Control response: system adjusts posture, torque, or motion commands
- Operational benefit: improved balance, safer contact behavior, and better consistency over time
What changes outcomes most:
- Sensor selection: type + measurement range matched to the application
- Integration: output interface + controller/PLC compatibility (and amplification if needed)
- Environment: dust/coolant/water exposure and temperature variation
Step-by-step: How to Choose and Integrate Strain-Type Sensors
Choose and integrate strain-type sensors by starting from the force/torque you must measure, then selecting the sensor type, range, output, and protection level that fits your machine.
- Define what you need to measure: linear force, torque at a joint, or multiple forces/torques.
- Estimate the expected range: include peak loads, not just “normal” values.
- Select the sensor type: load cell (force), joint torque sensor (rotary torque), or multi-axis force/torque sensor (6 DOF).
- Pick an output/interface plan: raw strain bridge (~mV/V) vs amplified analog vs digital bus (by model).
- Plan signal conditioning: if output is low-level mV/V, confirm amplifier/instrumentation requirements.
- Check environmental requirements: sealing needs (dust, splashes, coolant), plus temperature conditions.
- Validate mechanical fit: confirm mounting space and how forces pass through the sensor.
- Integrate with control logic: use the signal for feedback loops, limits, alerts, or compliance behavior.
- Test under real loads: verify readings across expected use cases and confirm safe overload behavior.
Maintenance tip: Periodically verify sensor behavior against known conditions to catch drift or changes in system loading over time.
Common problems and fixes
Common issues
- Unstable readings → noisy low-level output (~mV/V) → Use proper amplification/signal conditioning and clean integration.
- Unexpected overload events → peaks exceed rated load → Choose a range with safety overhead and confirm overload protection.
- Environmental failures (moisture/dust) → insufficient sealing → Use models with appropriate IP rating (many list IP65+; some IP67).
- Missed torque/force behavior at a joint → sensor placed away from true load path → Mount at key joints/structural points where strain occurs.
- Multi-axis confusion → cross-axis coupling impacts interpretation → Use calibrated multi-axis sensors and interpret all axes together.
Mistakes to avoid
- Sizing the sensor only for average loads instead of peak loads
- Ignoring the need for amplification when outputs are mV/V
- Skipping environmental protection requirements (dust, splashes, coolant)
- Choosing an interface that doesn’t match your controller/PLC setup
Assuming position-only sensors can replace force/torque feedback in force-critical tasks.
FAQ
What is a strain-type sensor in simple terms?
A strain-type sensor is a device that measures force or torque by detecting tiny deformations in a material. It uses strain gauges whose electrical resistance changes when stretched or compressed, then electronics convert that change into a measurable signal proportional to the applied force/torque.
Do strain-type sensors measure force, torque, or both?
Both—depending on the design. Load cells are commonly used for straight-line force (tension/compression), while torque sensors measure twisting force at joints. Multi-axis force/torque sensors can measure forces and torques together across multiple directions.
How do strain sensors provide feedback in robotic joints?
They can be mounted in or near a joint’s load path (for example, in a joint structure/flange) to measure torque as the robot lifts, pushes, or resists motion. The sensor outputs a signal (analog or digital), and the controller uses it for feedback control—adjusting motion based on real torque, not only position.
What does monitoring limb tension mean in practice?
It means measuring forces within a moving limb or linkage—like reading the “tension” in a tendon-like element. In robotics or assistive devices, this helps maintain proper load distribution and stability. If tension spikes unexpectedly (e.g., slip or stumble), the control system can respond immediately.
Can these sensors handle harsh and dynamic environments?
Many are designed for demanding environments and are often encapsulated to protect strain gauges. Some models list IP-rated sealing (e.g., IP66/IP67 in certain designs) and may include overload protection and temperature compensation, which supports accuracy in changing real-world conditions.
How accurate are strain-type sensors?
It depends on sensor type and model. Examples shown include load cells with ±0.1% of full scale (FS) typical non-linearity and highly repeatable performance, joint torque sensors around ±0.2% FS typical accuracy, and multi-axis sensors around ±1% FS (with high-end models achieving tighter performance). Always verify for the specific model.
What output signals should I expect?
Many strain-gauge sensors output low-level analog signals (e.g., ~mV/V) that require amplification. Some designs offer amplified outputs like 0–5V or 4–20 mA, and some multi-axis sensors provide digital outputs through interfaces like EtherCAT, Ethernet/IP, USB, or CAN (options vary by model).
How do I choose the right strain-type sensor for my project?
Start by defining what you need to measure (force, torque, or multiple axes), then estimate the expected range, including peak loads. Choose a sensor that covers that range with safety overhead, confirm it fits your mechanical design, and pick an output/interface that integrates cleanly with your controller/PLC and environmental conditions.
Do strain sensors help prevent overload and damage?
They can. By detecting load increases in real time, the system can alert, reduce force, or adjust behavior before failure—especially in dynamic robotics where forces change continuously. Overload protection features in quality sensors add another layer of resilience.
When should I Choose a multi-axis force/torque sensor instead of a load cell?
Choose multi-axis sensing when forces aren’t purely in one direction, or when you need both force and torque feedback simultaneously (common at wrists/ankles or interaction points). It provides a more complete picture of contact forces than a single-axis measurement.
One-minute Summary
- Strain-type sensors convert tiny deformation into a force/torque signal you can use for control.
- They’re used for load detection, joint torque feedback, and limb tension monitoring in robotics.
- Benefits include precision, overload protection, stability, and safer interaction.
- Selection depends on range, mounting, interface/output, and environmental protection.
- Load cell vs torque sensor vs multi-axis sensor depends on the force direction complexity.
Key terms
- Strain gauge: a component whose electrical resistance changes when stretched/compressed.
- Strain (mechanical): small deformation in a structure under load.
- Load cell: a sensor for measuring straight-line force (tension/compression).
- Torque sensor/transducer: a sensor that measures twisting force at a joint or shaft.
- Full scale (FS): the maximum rated measurement range of a sensor.
- mV/V output: a low-level strain-bridge output that often needs amplification.
- Multi-axis force/torque (6 DOF): sensing forces in X/Y/Z plus torques about those axes.
- IP rating: a protection rating indicating resistance to dust and water ingress.
PIB can assist in selecting the optimal sensor by reviewing your requirements. Often, our catalog will have a similar use-case example to guide the decision. Remember, the goal is a sensor that is accurate, robust, and fits seamlessly into your machine – taking the guesswork out of force measurement so you can focus on the overall system performance.


