Your cart is empty










 Short Rigid Couplings
Short Rigid Couplings Controlflex Couplings
Controlflex Couplings Jaw Couplings
Jaw Couplings Oldham Couplings
Oldham Couplings Bearing Locknuts – TCN
Bearing Locknuts – TCN Double Wide Shaft Collars
Double Wide Shaft Collars Heavy Duty Shaft Collars
Heavy Duty Shaft Collars International Series Shaft Collars
International Series Shaft Collars Keyed Shaft Collars
Keyed Shaft Collars Mountable Shaft Collars
Mountable Shaft Collars Quick Clamping Shaft Collars
Quick Clamping Shaft Collars Set Screw Shaft Collars
Set Screw Shaft Collars Thin Line Shaft Collars
Thin Line Shaft Collars Threaded Shaft Collars – Pacific International Bearing Products
Threaded Shaft Collars – Pacific International Bearing Products Two-Piece Shaft Collars
Two-Piece Shaft Collars Friction Bearing Universal Joints
Friction Bearing Universal Joints Needle Bearing Universal Joints
Needle Bearing Universal Joints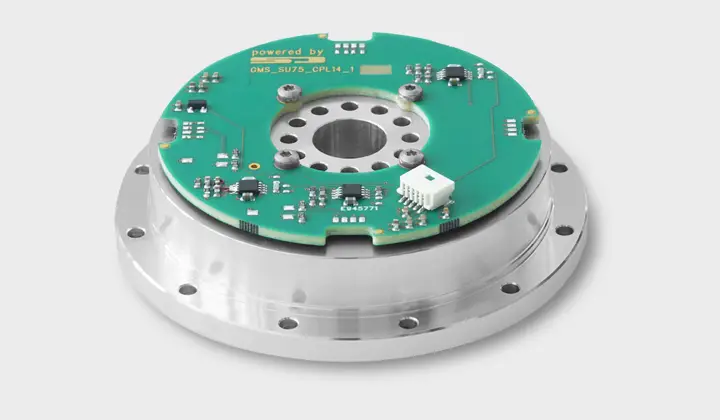
Power Transmission
TQF209H Robot Joint Torque Sensor
05 December, 2025
12 min read
Pacific International Bearing Sales (PIB) offers advanced sensing solutions for robotics, and the TQF209H robot joint torque sensor is a prime example. In modern robotic systems, precise joint torque sensing is critically important – whether it’s controlling the force applied by an assembly robot or ensuring a collaborative robot can detect collisions safely. By measuring the twisting force at a robot’s joints, torque sensors allow engineers to achieve better force control, improved safety, and higher precision in automation tasks. The TQF209H sensor addresses these needs by providing real-time, high-fidelity torque feedback in a compact, rugged form factor ideal for robotic joints.
Key Features of the TQF209H
The TQF209H is a flange-mounted reaction torque sensor designed to be integrated directly into a robot’s joint assembly. It has a compact cylindrical form with mounting flanges, allowing easy installation between mechanical interfaces. The robust metal construction is rated up to IP66 for dust-tight and water-resistant operation, making it durable enough for industrial environments. The unit can also safely withstand overloads up to 150% of its rated capacity without damage, providing a buffer against unexpected force spikes during operation.
Key Strengths and Differentiators: The TQF209H model stands out in PIB’s torque sensor lineup due to several notable features:
- High Sensitivity: It delivers a 2.0 mV/V output at full rated load (250 N·m). This high sensitivity means a stronger electrical signal for a given torque, making it easier to detect even minute changes in joint load. In practice, that translates to more precise control and feedback, especially important for delicate tasks or subtle force adjustments.
- Compact Form Factor: Engineered with a low-profile, flange-style design, the TQF209H fits neatly into tight joint spaces. Its lightweight, integrated structure minimizes added inertia on the robot arm. This compact form allows robotics engineers to instrument joints without significantly altering the robot’s size or dynamics – a crucial factor when retrofitting sensors into existing designs or maintaining a sleek form in new cobot models.
- Dynamic Measurement for Joints: Unlike large static test bench sensors, the TQF209H is built to measure torque during actual robotic motion. It can accurately track changing torque as a joint moves or as loads vary, rather than only measuring a fixed static load. This dynamic measurement capability means the sensor can provide real-time feedback through the full range of a joint’s motion, enabling active force control and quick response to transients (like a sudden contact or shifting payload).
- Real-Time Performance: The sensor’s strain gauge technology offers virtually instantaneous analog feedback with minimal latency. As soon as torque is applied to the joint, the TQF209H outputs a proportional signal that can be fed into the robot’s control system. This real-time performance is essential for closed-loop control algorithms – for example, allowing a robot to immediately adjust motor effort if it senses an unexpected resistance or to stop motion fast during a collision. Additionally, the sensor is temperature compensated to maintain accuracy across a broad range of operating temperatures, ensuring reliable output in various environments.
Beyond these points, the TQF209H also features excellent precision characteristics: non-linearity and hysteresis errors are low (on the order of ±0.5% of full scale or better), and it offers very good repeatability (around ±0.3% FS). Together, these qualities mean the sensor provides consistent and accurate readings cycle after cycle. Overall, the combination of sensitivity, robustness, and responsiveness makes the TQF209H well-suited for demanding robotic applications.
Applications in Robotic Systems
High-performance joint torque sensors like the TQF209H are key enablers for a variety of advanced robotic applications. Engineers and procurement managers will find that adding such sensors can significantly improve a robot’s capability and safety in the following scenarios:
- Industrial Robotic Arms (Automation): In automated production lines and assembly systems, torque sensors help maintain consistent force during assembly and detect anomalies. For example, a robotic arm fastening screws or pressing components can use joint torque feedback to apply just the right amount of force, improving quality and avoiding damage to parts. If a part is misaligned or a mechanism jams, the sensor detects the torque spike and can trigger the control system to stop or adjust, preventing equipment damage or product defects. The TQF209H’s 250 N·m capacity makes it suitable for even high-torque joints such as those on larger industrial robots in automotive or heavy machinery assembly.
- Collaborative Robots (Cobots): Collaborative robots are designed to work safely alongside humans, and torque sensing at the joints is fundamental to that safety. The TQF209H gives a cobot the “sense of touch” it needs to feel when it has bumped into an unexpected object (or person) and then quickly initiate a safe stop or retreat. Its high sensitivity allows detection of small contact forces, enabling delicate interaction and force-limited operation per ISO/TS 15066 safety requirements. Additionally, using joint torque feedback, cobots can perform force-controlled tasks like guiding a part into place or handing off objects to humans with a gentle touch. The compact size of the sensor is an advantage here as it keeps the cobot’s arm lightweight and maneuverable.
- High-Precision Assembly and Testing: Many specialized robots – such as those used in electronics assembly, medical device manufacturing, or laboratory automation – require extremely fine force control. A joint torque sensor like the TQF209H enables high-precision assembly bots to do things like insert delicate components, tighten fasteners to exact torque specifications, or perform constant-force polishing and grinding. In precision settings, even slight variations in force can affect quality, so the sensor’s real-time feedback helps the robot adjust on the fly to maintain optimal force. Furthermore, in R&D or testing environments, the sensor’s data can be logged to analyze torque profiles during operation, aiding in quality control and process optimization.
These examples are just a few of the real-world uses. Essentially, any robotic application that benefits from force awareness or force control at the joints is a strong candidate for integration of the TQF209H sensor. By providing immediate torque feedback, it enables smarter, safer, and more adaptable robots.
TQF209H Technical Specifications
The table below summarizes the key technical specifications for the TQF209H robot joint torque sensor. These specs reflect the sensor’s capacity, output characteristics, accuracy, and environmental ratings – important factors to consider when integrating the sensor into a robotics platform:
| Specification | TQF209H Joint Torque Sensor |
| Rated Torque (Capacity) | 250 N·m (nominal) |
| Rated Output (Sensitivity) | 2.0 mV/V (±20% tolerance) |
| Zero Balance (Offset) | ±0.05 mV/V |
| Non-Linearity Error | ±0.5% FS |
| Hysteresis Error | ±0.5% FS |
| Repeatability | ±0.3% FS |
| Creep (5 minutes) | ±0.3% FS |
| Temp. Coefficient (Output) | ±0.05% FS per 10 °C |
| Temp. Coefficient (Zero) | ±0.05% FS per 10 °C |
| Input Impedance | 2000 Ω ± 20 Ω |
| Output Impedance | 2000 Ω ± 10 Ω |
| Insulation Resistance | ≥ 5000 MΩ @ 100 VDC |
| Recommended Excitation | 5 ~ 12 V DC |
| Maximum Excitation | 15 V DC |
| Compensated Temp. Range | -10 °C to +60 °C |
| Operating Temp. Range | -20 °C to +80 °C |
| Safe Overload | 150% FS |
| Ultimate Overload | 200% FS |
| Protection Class | IP66 (dust-tight, water-resistant) |
FS = Full Scale (percentage of the sensor’s full rated torque)
Looking at the specifications, a few points stand out. The TQF209H’s 250 N·m capacity covers a wide range of medium to large robot applications, and its 2.0 mV/V output is relatively high, providing a strong signal for accurate measurement. The sensor maintains good accuracy (linear and hysteresis errors under 0.5% of full scale) and excellent repeatability (0.3%), which is vital for consistent performance in repetitive tasks. The broad operating temperature range and temperature compensation ensure that readings remain stable in various industrial environments. Additionally, the IP66 protection rating and sturdy overload tolerances indicate a durable design that can handle real-world conditions like vibration, dust, and occasional shock loads without compromising the sensor’s integrity or accuracy.
In practice, these specs mean the TQF209H can be trusted to deliver reliable torque data from your robot joint in real time, day in and day out. Integrating this sensor into a robotic joint can significantly enhance the robot’s ability to perform force-sensitive operations and react safely to its environment.
If you’re looking to enhance your robot’s capabilities with precision torque sensing, the TQF209H is an excellent choice. Please contact us with your requirements and we will assist in specifying the most compatible torque sensors for your robotics platform. Whether you need a high-capacity joint sensor or a different form factor, PIB’s catalog offers a range of options to meet your requirements – and our team is always ready to assist in selecting the perfect sensor for your application.
FAQ
Q: Is the TQF209H sensor compatible with collaborative robots (cobots)?
A: Yes. The TQF209H is well-suited for use in collaborative robots. Its compact size and flange-mount design make it easy to integrate into a cobot’s joints without adding excessive weight or bulk. Importantly, its high sensitivity allows the cobot to detect even minor contact forces. This means a cobot equipped with TQF209H joint sensors can quickly sense a collision or unwanted contact and respond (for example, by stopping motion), which is essential for safe human-robot interaction. Many cobots today rely on exactly this kind of joint torque feedback to meet safety standards and to perform force-limited tasks smoothly.
Q: What signal output types does the TQF209H support?
A: The TQF209H uses a strain gauge sensing element and provides a low-level analog output in the form of millivolts-per-volt (mV/V). Specifically, at full torque, it outputs about 2.0 mV/V, which means if you excite the sensor with, say, 10 V DC, you would get around 20 mV signal at full load. This raw mV/V signal ensures you get the highest fidelity data with minimal latency. In many applications, you would connect the TQF209H to an amplifier or signal conditioner module which can convert the mV/V output to standard industrial signal formats – such as 0-10 V voltage output, 4-20 mA current loop, or even a digital output if using a suitable ADC/interface. PIB offers compatible amplifier electronics that can be paired with the TQF209H, making it straightforward to integrate the sensor’s output into your robot’s control system or a PLC. By itself, the sensor’s output is analog and proportional to torque, which gives you a lot of flexibility in how you want to read and process the signal.
Q: How is the TQF209H different from other types of torque sensors?
A: The TQF209H is a reaction (static) torque sensor designed specifically for robot joints. This sets it apart from rotary (dynamic) torque sensors, which are built to measure torque on shafts that spin continuously (often using slip rings or rotary transformers). In contrast, the TQF209H doesn’t use rotating parts; it measures torque between two flanges, making it ideal for joints that move back-and-forth within a limited range rather than spinning 360° indefinitely. This design tends to be more compact and durable for in-line joint use. Additionally, unlike multi-axis force/torque sensors (which can measure forces and torques in multiple directions, such as the ones often used at robot end-effectors), the TQF209H focuses on a single axis of torque measurement. By concentrating on one torque axis, it achieves higher torque capacity and sensitivity for that axis than a comparably sized multi-axis sensor could. In summary, compared to other torque sensors, the TQF209H offers a form factor and performance tailored for high-precision, single-axis joint torque sensing. It provides the robustness and accuracy needed for robotic joints, whereas other torque sensors might be intended for different purposes (like motor shaft monitoring or multi-axis force feedback) and could have different form factors or output methods.