Your cart is empty










 Short Rigid Couplings
Short Rigid Couplings Controlflex Couplings
Controlflex Couplings Jaw Couplings
Jaw Couplings Oldham Couplings
Oldham Couplings Bearing Locknuts – TCN
Bearing Locknuts – TCN Double Wide Shaft Collars
Double Wide Shaft Collars Heavy Duty Shaft Collars
Heavy Duty Shaft Collars International Series Shaft Collars
International Series Shaft Collars Keyed Shaft Collars
Keyed Shaft Collars Mountable Shaft Collars
Mountable Shaft Collars Quick Clamping Shaft Collars
Quick Clamping Shaft Collars Set Screw Shaft Collars
Set Screw Shaft Collars Thin Line Shaft Collars
Thin Line Shaft Collars Threaded Shaft Collars – Pacific International Bearing Products
Threaded Shaft Collars – Pacific International Bearing Products Two-Piece Shaft Collars
Two-Piece Shaft Collars Friction Bearing Universal Joints
Friction Bearing Universal Joints Needle Bearing Universal Joints
Needle Bearing Universal Joints
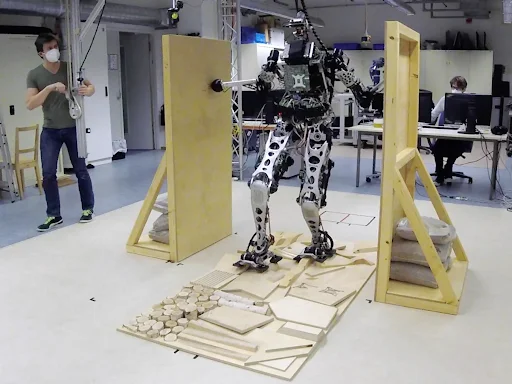
Robotics
Bearings Used in Positioning Robots
04 May, 2026
19 min read
Pacific International Bearing Sales (PIB) supplies the bearing types many positioning robots rely on: crossed roller bearings for rigid rotary axes, thin-section or angular-contact bearings when space is tight, and linear guides or cross-roller guides for precise straight-line travel. The right choice controls radial and axial play, controls friction, and protects repeatability under load.
Key Takeaways
- Crossed roller bearings are a strong fit for compact rotary axes that must carry radial, axial, and moment loads at the same time without giving up rigidity.
- Thin-section and four-point contact bearings are utilized when joint diameter must stay large but section height, weight, and packaging space cannot.
- If the robot rides on a linear axis, the guide is part of the accuracy system. Linear rolling guides and cross-roller guides are built for positioning mechanisms, repeatability, and backlash control.
- Preload, fit, sealing, and lubrication directly affect stiffness, torque, noise, heat, and long-term positioning behavior.
- PIB’s online catalog covers bearing types that robotics engineers specify , including crossed roller bearings, thin section bearings, angular contact bearings, miniature ball bearings, linear guides and carriages, spherical plain bearings, and rod ends.
Why Bearing Choice Shows Up in Robot Accuracy
A positioning robot can have a good servo, a good encoder, and a smart control loop and still feel “off” in the real world. That usually shows up as overshoot on stop, a slight wobble at the tool point, rising torque, more noise than expected, or repeatability drifting as the axis wears in. SKF defines preload as negative internal clearance and links it directly to stiffness and running accuracy, while THK ties high running accuracy and no-clearance behavior in guide systems to the way the guide is preloaded and mounted. In other words, the bearing stack is not passive hardware. It is part of the accuracy stack.
The practical split is simple. Rotary positioning axes need bearings that can manage radial load, axial thrust, and overturning moment without developing play. Linear positioning axes need guides that move with very low friction while staying rigid under off-center and reversing loads. That is why positioning robots rarely use one generic bearing style from base to tool. PIB’s robotics content reflects the same reality: robot systems combine joint bearings, thin-section bearings, miniature bearings, and linear motion components depending on how the axis actually moves and where the load path goes.
Here is the before-and-after version that matters to a buyer or engineer. Before: the axis technically moves, but it needs more correction, sounds rougher, and loses confidence as duty cycle climbs. After: the right bearing type, preload strategy, and mounting plan make the same axis stop cleaner, hold line better, and stay predictable longer.
The load language above is not academic detail for its own sake. THK, IKO, and SKF all separate bearing behavior along the same lines: load direction, rigidity, fit, preload, and motion type. If you define those well, bearing selection gets faster and markedly less expensive to correct later.
Bearing Types That Actually Make Sense in Positioning Robots
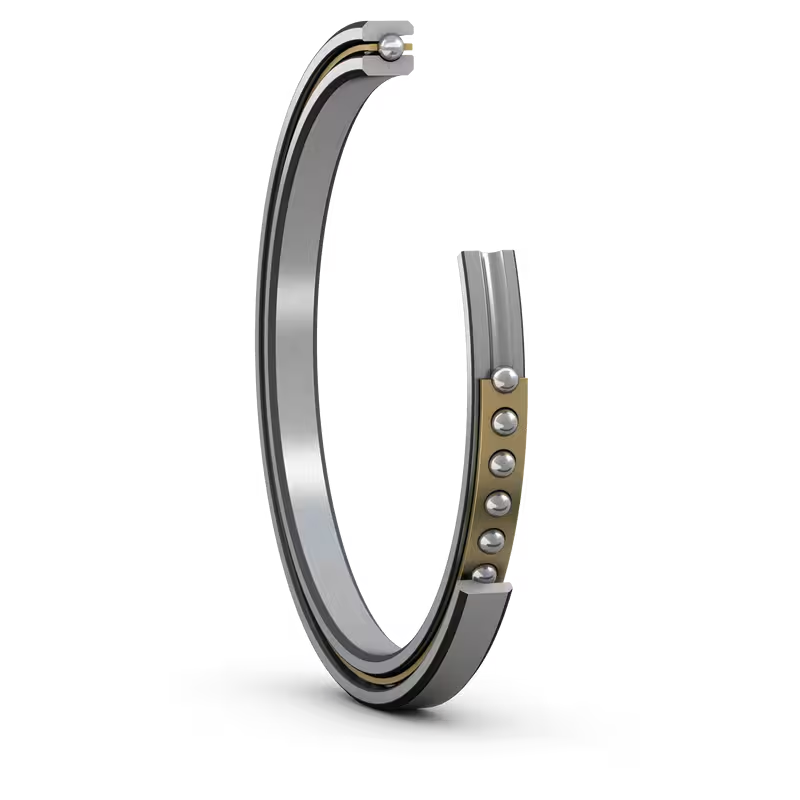
Crossed Roller Bearings for Compact Rotary Axes
If a rotary axis is compact and still has to deal with combined loads, crossed roller bearings are usually the first choice. THK states that a cross-roller ring uses rollers arranged at right angles in a 90 degree V-groove so one bearing can receive radial, axial, and moment loads in all directions. IKO describes the same geometry as a compact bearing that handles complex loads simultaneously from any direction. That makes crossed roller bearings a very natural fit for robot wrists, indexing heads, rotary tables, compact turn systems, and other positioning-heavy joints where stiffness matters more than catalog simplicity.
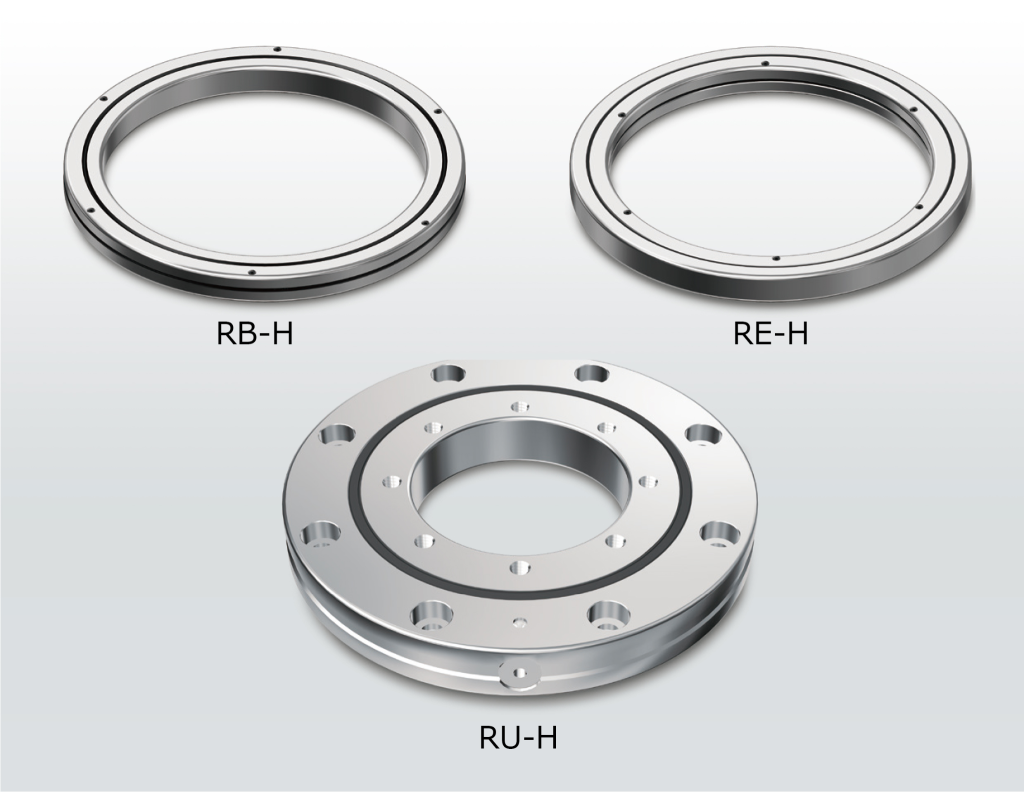
This is also why PIB’s robotics content keeps coming back to crossed roller bearings in robot joints. They solve the “one bearing, many loads” problem cleanly. Instead of stacking separate radial and thrust elements, you often get a single compact package with better rigidity and a clearer mounting story. THK even notes Model RB is used where rotational accuracy of the inner ring is required, including swivel portions of index tables, which is exactly the kind of positioning-minded use case that overlaps with robotic rotary axes.
Thin-Section and Four-Point Contact Bearings When Space Is the Constraint
Thin-section bearings are what engineers reach for when the joint diameter needs to stay large but the section height cannot grow with it. SKF’s Kaydon Reali-Slim line is built around a constant cross-section as bore size increases, specifically to save space and weight. PIB’s own thin-section guidance makes the same point more plainly: these bearings help keep robotic joints slim, light, and easier to package, especially where cables or tubing need to pass through the center of a rotating joint.
Four-point contact thin-section bearings matter even more for positioning robots because they can often replace a two-bearing arrangement. SKF says a single Reali-Slim four-point contact bearing can replace two bearings in many applications, saving space and weight while simplifying mounting. PIB makes a parallel point in its robotics writing: four-point contact designs are useful when one compact bearing must deal with radial, axial, and moment loads in tight space. That makes them a strong option for slim rotary wrists, hollow joints, compact turntables, camera heads, and other packaging-sensitive positioning modules.
Angular-Contact Bearings When You Want Controlled Stiffness
Single-row angular-contact ball bearings are built to carry radial load plus axial load in one direction, and SKF says they are typically adjusted against a second bearing. NSK says essentially the same thing: because an axial component is generated under radial load, these bearings are commonly used in pairs or multi-bearing sets. That paired behavior is exactly why angular-contact bearings remain a workhorse in servo inputs, reducer supports, and rotary shafts where you want to tune stiffness through preload rather than jump straight to a crossed roller bearing.

The detail that matters in positioning work is arrangement. SKF notes that face-to-face sets are less stiff but more tolerant of misalignment, while back-to-back sets provide greater moment rigidity. So if the axis must hold a tool point solidly under overturning load, back-to-back is often the more attractive layout. If the axis geometry is more forgiving and slight misalignment accommodation matters, face-to-face may be easier to live with. Either way, preload is an important part of the design.
Linear Guides and Cross-Roller Guides for Straight-Line Positioning
If the robot moves along a rail, the guide is the positioning bearing. IKO calls linear motion rolling guides indispensable for reducing linear-motion friction in positioning mechanisms of machinery. THK says linear guide mechanisms are used to move or position objects along a straight line with precision, and it links guide selection directly to conditions like accuracy, backlash, rigidity, and load. For gantry robots, Cartesian pick-and-place systems, inspection robots, dispensing systems, or any “seventh-axis” motion, this is the center of the design conversation.
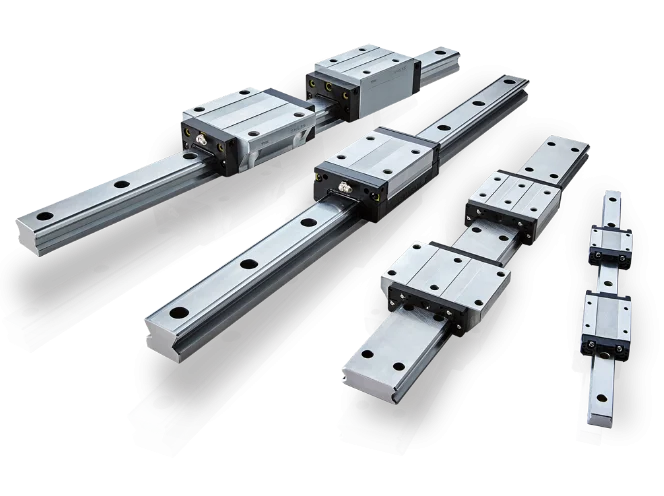
When stroke is finite and the priority is stiffness plus smooth low-friction travel, crossed-roller guides and cross-roller tables become especially attractive. IKO says its Crossed Roller Way achieves very small, smooth friction resistance without stick-slip. THK describes its Cross-Roller Table as a compact, highly rigid linear guide unit that achieves a highly accurate linear guide mechanism simply by bolting the unit in place. That combination makes them easy to picture inside measuring stations, compact positioning robots, board handling systems, inspection equipment, or high-precision assembly modules.
Deep-Groove, Miniature, and Spherical Plain Bearings in Supporting Roles
Deep-groove ball bearings are still useful in positioning robots, just usually not as the star of the main combined-load structural axis. SKF describes them as low-friction, low-noise, low-vibration bearings that accommodate radial and axial loads in both directions. That makes them a practical fit for motor shafts, idlers, pulleys, compact secondary pivots, and other faster-running or lighter-duty sections of the robot. PIB also highlights miniature deep-groove bearings for compact robotic fingers, wrists, and other small joints where space is tight and motion has to stay smooth.
Spherical plain bearings and rod ends belong in the conversation too, but with the right expectations. SKF says radial spherical plain bearings are particularly suitable where alignment movements must be accommodated, or where oscillating and recurrent tilting motions happen at relatively slow sliding speeds, often with heavy loads. That makes them very good at linkages, control rods, and intentional misalignment points. Engineering inference: because their design priority is misalignment and oscillation rather than ultra-stiff rolling accuracy, they are not usually the first choice for the primary precision-bearing element of a straight, repeatable positioning axis.
Specification Table and Selection Schemes
The fastest way to improve bearing selection is to stop asking “What bearing size fits?” and start asking “What does the axis need to hold, how accurately, at what torque, in what environment?” THK’s positioning standards use terms like positioning repeatability, positioning accuracy, running parallelism, and backlash; SKF and Minebea tie preload, torque, and stiffness together the same way. That is the right frame for positioning robots.
| Robot area or problem | Bearing family that usually fits best | Why it fits |
| Compact rotary axis with combined radial, axial, and overturning loads | Crossed roller bearing | One compact ring can take radial, axial, and moment loads together, which is why crossed rollers show up in robotic joints, positioning stages, and precision rotary sections. |
| Large-diameter hollow joint that still must stay slim | Thin-section four-point or thin-section angular-contact bearing | Constant cross-section saves space and weight; four-point versions can often replace a two-bearing stack. |
| Servo input, reducer support, or shaft set where stiffness is tuned by preload | Angular-contact pair | Single-row angular-contact bearings are typically paired, and arrangement plus preload determine how stiff or forgiving the assembly becomes. |
| Straight-line positioning axis on a gantry, carriage, or rail | Linear guide, cross-roller guide, or compact positioning table | These products are designed around low friction, rigidity, repeatability, and backlash-sensitive positioning. |
| Small secondary pivots, idlers, end-effectors, or compact subassemblies | Deep-groove or miniature ball bearing | Low friction, low noise, and compact packaging make them practical in smaller robotic components. |
| Linkages where misalignment is real and unavoidable | Spherical plain bearing or rod end | These are built to accommodate misalignment and oscillation, especially under combined load and slower movement. |
Crossed rollers and thin-section bearings solve structural compactness in rotary axes, angular-contact pairs solve tuned shaft support, and linear guides solve straight-line positioning.
Reference Specs
| Reference component | Example specs | What it illustrates |
| THK RB5013 crossed-roller ring | 50 mm ID, 80 mm OD, 13 mm width; basic dynamic load rating 16.7 kN; basic static load rating 20.9 kN; accuracy grades listed from grade 0 through P2; sealed form shown as RB…UU. | A compact rotary-axis bearing that still carries meaningful combined load. |
| PIB robotic thin-bearing example 6804 | 20 mm ID, 32 mm OD, 7 mm width. | How a slim bearing keeps a small robotic joint narrow without giving up diameter. |
| THK miniature cross-roller table VRT/VRT-A | Basic dynamic load rating 0.46 to 8.57 kN; basic static load rating 0.61 to 15.9 kN. | What a compact, high-accuracy finite-stroke positioning guide looks like. |
| IKO TU precision positioning table | Track-rail widths from 25 mm to 130 mm; two rows of large-diameter steel balls in four-point contact; designed for stable high accuracy and rigidity under fluctuating and complex load. | A slim linear positioning module that behaves like a robot axis, not just a slide. |
| IKO LH precision positioning table | Table widths from 120 mm to 420 mm; two linear ways in parallel for stable running accuracy, positioning accuracy, and larger carrying mass. | A heavier-duty linear positioning architecture for longer stroke and larger load. |
What to Lock Down Before You Ask for a Part Number
| Specification to define first | Why it matters in practice |
| Radial load, axial load, and moment load | These determine whether a simple ball bearing works, whether you need a paired set, or whether the axis really wants a crossed roller or a stiffer guide arrangement. |
| Repeatability target and allowable backlash or lost motion | THK explicitly treats positioning repeatability, positioning accuracy, and backlash as separate performance items in positioning systems. |
| Duty cycle, speed, and stop-start behavior | Preload, grease type, and torque all change when the axis is cycling hard instead of moving occasionally. |
| Space envelope and any hollow-shaft requirement | Thin-section bearings exist because you often need large diameter support without adding radial bulk. |
| Environment: dust, moisture, chemicals, cleanroom conditions | Seal choice and material choice change quickly once contamination control or corrosion is part of the job. |
| Fit, mounting quality, and preload strategy | A good bearing installed into a distorted or poorly fitted structure becomes a bad axis. THK and SKF both tie rigidity and accuracy back to fit and preload. |
| Lubrication plan | Lubrication affects friction, wear, torque, and life; PIB and the OEMs all treat it as a core selection item, not a maintenance note. |
Selection Mistakes That Show Up Later on the Floor
The first common mistake is choosing by envelope dimensions only. Two solutions can fit the same pocket and behave very differently once the axis sees reversing thrust or overturning moment. Crossed rollers, four-point thin-section bearings, and paired angular-contact bearings all solve different versions of the same geometry problem. If the load case is not defined clearly, the bearing decision gets pushed onto assembly and control tuning, which is the expensive place to discover it.
The second mistake is treating preload like free stiffness. SKF and Minebea are very clear on the tradeoff: preload improves stiffness and running accuracy, but too much preload raises friction, heat, noise, and can shorten service life. In other words, “more preload” is not a serious accuracy strategy by itself. The correct preload is the one that supports the positioning requirement without turning the axis into a torque sink.
The third mistake is assuming the seal decision is only about contamination. It is also a torque decision. PIB’s robotics writing repeatedly notes that seals improve protection but add drag, while shielded or open arrangements lower friction when the environment is controlled. That tradeoff matters in positioning robots because friction torque shows up in small move quality, current draw, and thermal behavior.
The fourth mistake is asking a misalignment-friendly part to behave like a primary precision axis bearing. Spherical plain bearings are excellent when oscillation and misalignment are truly built into the linkage. But if the design goal is a straight, rigid, repeatable positioning axis, the system usually wants a rolling-element rotary bearing or a linear guide solution instead. That last sentence is an engineering inference from how SKF describes spherical plain bearings versus how THK and IKO describe precision guide systems.
FAQ
What is the best bearing for a rotary positioning robot axis?
If the axis is compact and sees radial, axial, and moment loads together, crossed roller bearings are usually the strongest first look because one bearing can take all three load directions with high rigidity. If packaging is tighter than the load case, thin-section four-point contact bearings become attractive. If the axis behaves more like a shaft support and you want tunable stiffness through preload, angular-contact pairs are often the practical answer.
What should I use for a linear positioning robot?
Use linear guides, cross-roller guides, or compact positioning tables designed specifically for positioning mechanisms. IKO and THK both frame these products around straight-line precision, repeatability, backlash-sensitive behavior, and rigidity. For gantries, pick-and-place heads, inspection carriages, and rail-mounted robot axes, that is the right product family to start with.
Can one bearing replace a two-bearing stack?
Often, yes. SKF states that in many applications a single Reali-Slim four-point contact bearing can replace two bearings, saving space and simplifying the mount. Crossed roller bearings solve a similar problem differently by taking radial, axial, and moment loads in one compact ring. Which route is better depends on the load pattern, speed, packaging, and required stiffness.
How much do preload and clearance really matter?
They matter a lot. SKF describes preload as negative internal clearance and links it to stiffness and running accuracy. Minebea adds that insufficient preload lowers bearing stiffness and can allow vibration-related damage, while excessive preload increases noise and reduces life. In positioning robots, that tradeoff shows up directly in stop quality, repeatability, torque, and wear.
Should I choose open, shielded, or sealed bearings?
Choose based on both environment and friction budget. PIB’s robotics articles note that sealed bearings give better contaminant protection but add friction, while shielded or open versions are often preferred in cleaner internal joints where rolling resistance matters more. The more contamination risk you have, the more the protection side of the tradeoff starts to win.
Does PIB carry the bearing types used in positioning robots?
Yes. PIB’s shop and robotics pages show categories that map directly to positioning-robot needs, including crossed roller bearings, miniature ball bearings, angular-contact bearings, super precision angular-contact bearings, thin section bearings, linear guides and carriages, spherical plain bearings, and rod ends. PIB also represents major bearing manufacturers and provides engineering support and other OEM-focused services.
Editorial Fit Note
I was not able to review the referenced screenshots because no retrievable screenshots were attached to this conversation. This draft therefore mirrors the publishing patterns visible in current PIB robotics and bearing posts: a short direct answer under the title, skimmable takeaways, plain-English load discussion, comparison tables, FAQ, and a closing catalog-focused CTA.
Find the Right Bearing Faster
If you are narrowing options right now, the PIB online catalog is the right place to start. The site already organizes the families most positioning-robot designs compare in real life: Crossed Roller Bearing, Thin Section, Angular Contact Ball Bearings, Super Precision Angular Contact Bearings, Miniature Ball Bearings, Linear Guides & Carriages, Spherical Plain, and Rod Ends. PIB also offers engineering support, custom designs, relubrication services, volume pricing, and B2B tools that fit OEM workflows.
For bearing solutions that support accurate, repeatable positioning robot performance, explore the PIB online catalog or call PIB at (800) 228-8895. Our team can help you identify the right components for your application.