Your cart is empty










 Short Rigid Couplings
Short Rigid Couplings Controlflex Couplings
Controlflex Couplings Jaw Couplings
Jaw Couplings Oldham Couplings
Oldham Couplings Bearing Locknuts – TCN
Bearing Locknuts – TCN Double Wide Shaft Collars
Double Wide Shaft Collars Heavy Duty Shaft Collars
Heavy Duty Shaft Collars International Series Shaft Collars
International Series Shaft Collars Keyed Shaft Collars
Keyed Shaft Collars Mountable Shaft Collars
Mountable Shaft Collars Quick Clamping Shaft Collars
Quick Clamping Shaft Collars Set Screw Shaft Collars
Set Screw Shaft Collars Thin Line Shaft Collars
Thin Line Shaft Collars Threaded Shaft Collars – Pacific International Bearing Products
Threaded Shaft Collars – Pacific International Bearing Products Two-Piece Shaft Collars
Two-Piece Shaft Collars Friction Bearing Universal Joints
Friction Bearing Universal Joints Needle Bearing Universal Joints
Needle Bearing Universal Joints
Robotics
Joint Torque Sensors Designed for High Precision and Reliability in Robotic Joints
03 November, 2025
26 min read
Pacific International Bearing Sales (PIB) offers a wide range of high-precision torque sensors for robotics, engineered for excellent accuracy and reliability. In robotic systems, precise torque measurement is critical – whether it’s monitoring the force at a robot’s joint, controlling a delicate assembly tool, or measuring drive torque in a motor shaft. PIB’s torque sensor lineup covers robot joint torque sensors, micro torque sensors, static (reaction) torque sensors, and dynamic rotating torque sensors, each designed to meet specific application needs. These sensors feature high resolution outputs, excellent repeatability, robust overload safety margins, and temperature compensation for stability across varying environments. Below, we discuss each category in detail, including key product models (e.g. TQF209H, TQF209Z, TQF209D3, TQ209C, TQ903S, TQ903F, TQ903C, TQ903B, TQ903J, TQ903L, TQR473, TQ908A, TQ908B, TQ908C, TQ908D, TQ908F, TQ908G, TQ903) along with their technical specifications and features.
Robot Joint Torque Sensors

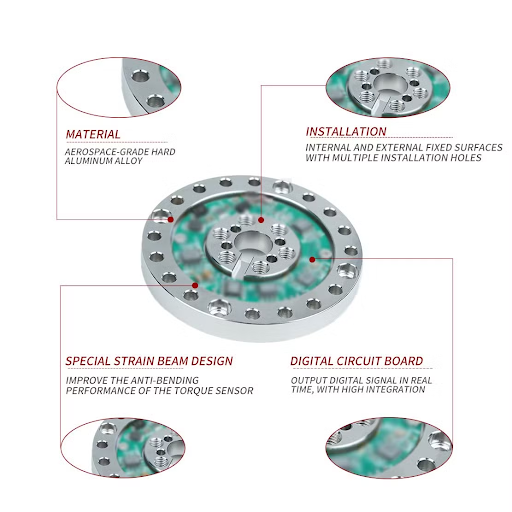
Robot joint torque sensors are reaction torque transducers designed to be integrated at robotic joints or in line with actuators. They measure the static or semi-static torque at a joint, providing feedback for force control, collision detection, and precision assembly tasks. These sensors are typically flange-mounted, compact, and robust, with high protection ratings to withstand industrial environments. They have built-in strain gauges that output a low-level analog signal (in mV/V), which can be amplified for high-resolution torque readings. Key features of PIB’s robot joint torque sensors include high precision (low non-linearity and hysteresis), excellent repeatability, and overload protection to prevent damage from shock loads. Temperature compensation ensures accuracy is maintained over a broad range of operating temperatures (typically -20°C to +80°C).
Notable models in this category include TQF209H, TQF209Z, TQF209D3, and TQ209C. All are static/reaction torque sensors with similar form factors (flange-style) but different capacity ranges and sensitivities to suit various robot sizes. The table below summarizes their specifications:
| Model | Rated Torque Range | Rated Output | Accuracy (Non-linearity) | Repeatability | Overload Safety | Protection |
| TQF209H | 250 N·m | 2.0 mV/V (±20%) | ±0.5% FS | ±0.3% FS | 150% safe, 200% ultimate | IP66 (sealed) |
| TQF209Z | 200 N·m | 1.0 mV/V (±20%) | ±0.5% FS | ±0.5% FS | 120% safe, 200% ultimate | IP66 (sealed) |
| TQF209D3 | 50, 100, 200, 400 N·m (selectable) | ~1.0 mV/V typical | ±0.3% FS | ±0.3% FS | 120% safe, 150% ultimate | IP66 (sealed) |
| TQ209C | 10, 30, 50, 80, 100, 150 N·m (selectable) | 1.5 mV/V (±2%) | ±0.2% FS | ±0.1% FS | 150% safe, 200% ultimate | IP66 (sealed) |
Table: Specifications of Robot Joint Torque Sensors (static reaction type). All use strain gauge sensing (mV/V output) and require an amplifier for signal conditioning.
Each of these joint torque sensors is compact and easy to integrate into a robot’s mechanical structure. For example, TQF209H and TQF209Z have flange mounting interfaces and IP65/IP66 ingress protection, making them suitable for industrial robot joints where they may be exposed to dust or coolant. TQF209D3 offers multiple range options (50 N·m up to 400 N·m) in one design, providing flexibility for different joints while maintaining high accuracy (0.3% non-linearity). TQ209C is a high-precision joint sensor with strong anti-bending load capability; it boasts very low hysteresis (0.5% FS) and excellent repeatability (0.1% FS), making it ideal for sensitive force-controlled applications (e.g., force-limited collaborative robots or surgical robots). All these sensors incorporate overload protection (safe overload from 120% to 150% of full scale, and ultimate overload up to 200% FS) to ensure durability in the event of unexpected torque spikes. The temperature effect on zero and span is minimal (typically 0.05% FS/10°C or better), thanks to integrated temperature compensation, which helps maintain calibration even as the robot’s joints heat up during operation.
Resolution and interface: The resolution of these joint torque sensors is essentially limited only by the quality of the signal conditioner used, since the strain gauge output is analog. With a proper amplifier or ADC (e.g. 16-bit or 24-bit instrumentation amplifiers), the sensors can resolve very fine torque increments (on the order of 0.1% of full scale or better), enabling smooth force feedback control in robotic applications. The sensors output an analog mV/V signal proportional to torque; common practice is to pair them with a high-resolution amplifier or a digital interface module. Some models can be customized with built-in amplifiers or digital communication (like CAN or RS485), but the standard configuration from PIB delivers a raw analog signal for maximum flexibility and real-time response.
Micro Torque Sensors
Micro torque sensors refer to torque transducers designed for low torque ranges and compact sizes, often used in precision assembly tools, small robotic actuators, or test instruments where measuring small torques is crucial. Despite their smaller capacity, these sensors offer high accuracy and stability, similar to their larger counterparts. They are typically static/reaction torque sensors (meant for measuring torque on a stationary or quasi-static shaft) and have very compact structures to fit in tight spaces (for example, in the head of a screwdriver or inside a small robot joint).
PIB’s micro torque sensor series is denoted by the TQ903 model family, which includes variants like TQ903S, TQ903F, TQ903C, TQ903B, and a base model TQ903. All use strain gauge technology with mV/V output, and feature robust metal construction (often stainless steel or aluminum alloy) for longevity. They come with IP65 protection or better, ensuring that dust or light fluids do not affect their performance. The micro sensors have built-in temperature compensation and offer high repeatability and low creep, which is important when measuring small torques accurately over time.
To accommodate a wide range of applications, the TQ903 series spans an extremely broad capacity range – from as low as 0.1 N·m up to several thousand N·m (with different sub-models optimized for different ranges). For example, TQ903S covers very low torques (starting at 0.1 N·m), while TQ903B and the standard TQ903 model cover mid-range torques up to 100–150 N·m. Other variants extend even further: TQ903C is designed for extended capacities (it can be configured for torque up to the order of 10 kN·m, i.e. 10,000 N·m), and TQ903L (in the Static category, discussed later) goes even higher with ultra-high precision. Each variant also has a slightly different mechanical form factor (for example, some have a square or round flange, different output shaft configurations, or mounting hole patterns) to suit various integration requirements.
Key specifications for select micro torque sensor models are given below:
| Model | Torque Range | Accuracy (Non-linearity) | Repeatability | Safe Overload | Output | Protection |
| TQ903S | 0.1 ~ 12 N·m (multiple ranges: 0.1, 0.3, 1.5, 3, 6, 10, 12 N·m) | ±0.2% FS | ±0.2% FS | 120% FS (150% ultimate) | Analog mV/V (strain gauge) | IP65 |
| TQ903B | 0.2 ~ 150 N·m (e.g. available in 0.2, 1, 5, 10, 20, 50, 150 N·m versions) | ±0.1–0.2% FS (typical) | ±0.1% FS | 150% FS (ultimate 150%–200%) | Analog mV/V | IP65 |
| TQ903F | Medium range variant (e.g. in tens of N·m) – similar to TQ903B in performance | ±0.2% FS (est.) | ±0.2% FS (est.) | 120–150% FS | Analog mV/V | IP65 |
| TQ903C | Extended range: can be configured from 0.2 N·m up to ~10 kN·m (custom) | ±0.2% FS (for typical ranges) | ±0.2% FS | 150% FS (200% ult.) | Analog mV/V | IP65 |
Table: Micro Torque Sensor specifications (TQ903 series). Note: TQ903F and TQ903C cover special mounting or range options; their specifications are similar to other TQ903 sensors, with precise values depending on the specific range configuration.
Despite their small size, the micro torque sensors offer excellent precision. For instance, TQ903S (the smallest range model) has non-linearity and hysteresis around 0.2% of full scale, meaning even at 0.1 N·m you get reliable readings with minimal error. Its output sensitivity is about 0.8 mV/V at the lowest ranges (rising to ~1.8 mV/V for a 1.5 N·m range), ensuring a measurable signal even for tiny torques. The repeatability and creep are also around 0.2% FS, which is crucial when making repetitive measurements in assembly processes (e.g. consistent screw tightening torques).
For higher ranges, the standard TQ903/TQ903B units achieve even better accuracy – on the order of 0.1% FS non-linearity in some ranges – enabling them to be used as reference torque transducers for calibration of tools or in high-end test equipment. These sensors have input resistance around 700–1000 Ω and output resistance closely matched, which indicates a stable strain gauge bridge design. Temperature drift is very low (often 0.01–0.05% FS per 10°C), especially in the mid-range models, meaning the zero and span won’t significantly shift with normal temperature changes in a production environment.
Highlighted features:
- High Resolution and Stability: The TQ903 series provides high signal resolution, limited only by the external amplifier’s quality. With a good amplifier, micro torques can be resolved to fractions of a percent. The sensors’ stable strain gauge bridge and low noise make them suitable for detecting minute torque changes – critical in precision tasks like electronic assembly or biomedical device manufacturing.
- Overload Protection: Most micro sensors in this series handle 120% of rated torque without damage (safe overload), and will typically survive up to 150–200% of rated torque as ultimate overload. This is important because even small sensors might experience occasional spikes (for example, if a screw bottoms out unexpectedly, generating a brief torque surge).
- Temperature Compensation: These sensors are calibrated to minimize thermal effects. For example, zero output change is just 0.02–0.05% FS/10°C in many models, which means you can trust the torque readings across typical operating temperatures (10°C to 60°C range) without needing frequent recalibration.
- Mounting and Form Factor: Micro torque sensors often feature a flange or hub on one side and a keyed or hex drive on the other, allowing easy insertion in line with a small shaft or tool. Models like TQ903F and TQ903C may have different mounting styles (some are designed to be integrated into OEM equipment). All are built with a low-profile, compact structure, enabling integration into space-constrained applications.
Communication Interface: Like the joint sensors, micro torque sensors output a millivolt-level signal and can be paired with PIB’s optional amplifiers or signal conditioners for digitization. In some setups, these sensors are connected to high-resolution ADC modules that provide a digital output (USB, CAN, etc.) for logging or control systems. This flexibility allows robotics engineers to incorporate the sensors into custom control loops or data acquisition systems with ease.
Static Torque Sensors (Reaction Torque Transducers)
Static torque sensors (reaction torque transducers) are used to measure torque in a non-rotating setup or in applications with only limited, non-continuous rotation. They are often called reaction torque sensors because they typically mount between a torque-generating element and a fixed point, sensing the reaction torque. In robotics and industrial automation, static torque sensors are utilized for tool calibration, bolt fastening monitoring, and test rigs. They do not have rotating bearings or slip rings (except in certain designs for slight rotation), which makes them extremely durable and capable of very high precision.
PIB provides several high-end static torque sensors, including TQ903J, TQ903L, and TQR473 (along with the previously mentioned TQ903-series variants, some of which overlap categories). These models are tailored for different capacity ranges and features:
- TQ903J Static Torque Sensor: A low-capacity reaction sensor (approximately 0.1 N·m up to 12 N·m range) designed for high precision in small torques. It’s very compact and has an IP65/67 protected body. Despite its small range, it uses the same robust strain gauge principles. TQ903J exhibits ±0.1% FS non-linearity and hysteresis, and excellent repeatability, making it suitable for precision screwdriver torque verification, micro-motor torque testing, or any application where small torques must be measured reliably. It has a high overload tolerance (150% safe, 200% ultimate) for safety. Notably, TQ903J is sealed to IP67, offering enhanced protection (it can handle exposure to moisture or coolant in industrial environments).
- TQ903L Static Torque Sensor: A high-capacity, high-precision reaction sensor, covering nominal ranges from about 50 N·m up to 20 kN·m (20,000 N·m). This is a specialized sensor for measuring very large torques (for instance, in industrial bolt testing, large gear torque reaction, or engine test stands). Even over such large ranges, TQ903L maintains extremely tight accuracy – on the order of 0.03% FS non-linearity, hysteresis, and repeatability. This sensor has a patented design (as noted in its specs) to ensure stability and to handle such loads. It features IP65/IP66 protection and uses high-strength alloy steel construction. The output is a standard mV/V strain gauge signal (approximately 1.0 mV/V at full scale), and an excitation of 5 V is used (to minimize self-heating). Engineers choose TQ903L when they need laboratory-grade accuracy in an industrially rugged package for large torque measurements.
- TQR473 Static Torque Sensor: A medium-range static torque transducer, unique in that it comes with an integrated signal conditioner. This model spans 5 N·m to 100 N·m capacities, targeting applications like power tool monitoring or robotic wrist torque measurement. TQR473 outputs a ±10 V analog signal proportional to torque (it can be configured to output other signal types, such as 4–20 mA, if needed), meaning it has built-in electronics and is ready to interface with PLCs, data acquisition systems, or servo controllers directly. Internal conditioning slightly affects its precision compared to pure strain gauge outputs – it has about ±0.3% FS accuracy – but offers great convenience. It operates on 24 V DC excitation (for the amplifier) and provides a bipolar output for bidirectional torque. It is also designed with bending moment resistance in mind (as highlighted by its features of “strong bending resistance”), which is useful when the sensor might experience side loads or mounting misalignment. The TQR473 is rated IP65 and made of alloy steel, ensuring durability in assembly line environments. It’s often used for monitoring tightening torques in automated screwdrivers or for test rigs where a plug-and-play torque sensor is needed.
Below is a summary table for the static torque sensor models:
| Model | Torque Range | Accuracy | Output Signal | Overload Capacity | Protection |
| TQ903J | 0.1 – 12 N·m | ±0.1% FS (non-linearity) | Analog mV/V (strain gauge) | 150% safe, 200% ultimate | IP67 (water/dust tight) |
| TQ903L | 50 N·m – 20,000 N·m (20 kN·m) | ±0.03% FS (ultra high precision) | Analog mV/V (strain gauge) | 120% safe, 150% ultimate | IP66 (industrial sealed) |
| TQR473 | 5 – 100 N·m | ±0.3% FS | ±10 V DC analog (built-in amp) | 150% safe, 200% ultimate | IP65 (protected) |
Table: Static (Reaction) Torque Sensor specifications. TQ903J and TQ903L require external amplifiers, whereas TQR473 includes an internal amplifier for ±10 V output.
Use cases: Static torque sensors like these are ideal for calibration and test. For example, a robotics engineer might use TQ903J to calibrate the small joint torques of a prosthetic or haptic device. TQ903L could be used in a test stand to measure the holding torque of a large robotic arm’s base or for testing automotive drive shafts. TQR473 might be mounted on a stationary flange with a robot’s tool attached, to directly measure the torque the tool is exerting on a workpiece in real time (facilitating closed-loop control without needing to calculate torque from motor current).
All static sensors are built to handle static and transient torques but are not intended for continuous high-speed rotation (they typically allow only limited rotation for taking up slack, etc.). They have no moving parts in the sensing element, which contributes to their long service life and zero maintenance operation. The lack of slip rings (except in special dynamic hybrids) means there’s no wear and no noise introduced by contacts, yielding very stable zero and sensitivity over time.
Resolution and interfaces: The pure strain-gauge output models (TQ903J, TQ903L) can achieve extremely high resolution with an appropriate external amplifier – for instance, paired with a 24-bit ADC, one can resolve micronewton-meter changes even on the 0.1–12 N·m TQ903J. The TQR473, with its ±10 V output, is typically limited by a ±0.05% FS zero offset and 0.3% accuracy, but it offers the convenience of directly interfacing with analog input modules of control systems. Additionally, PIB can provide compatible digital indicators or amplifier modules for these sensors, some of which offer USB or fieldbus outputs if needed for integration into modern smart factory systems.
Dynamic Torque Sensors (Rotary Torque Sensors)
Dynamic torque sensors are designed to measure torque on a rotating shaft, such as a motor output shaft, gearbox, or drive train component. In robotics and automation, dynamic torque transducers are used for tasks like motor torque monitoring, efficiency testing, and feedback control in rotating joints or spindles. Unlike static sensors, dynamic sensors must handle continuous rotation, so they incorporate special designs to transmit the torque signal from the rotating element to a stationary output. This is typically done either through slip rings or via non-contact signal coupling (e.g., rotary transformer or wireless telemetry). PIB’s dynamic torque sensors (the TQ908 series) prioritize high precision while allowing rotation at various speeds, and they offer multiple output interface options (frequency, analog voltage, or current), making them versatile for real-time monitoring and control.
The TQ908 series includes several models optimized for different torque ranges and speed capabilities: TQ908A, TQ908B, TQ908C, TQ908D, TQ908F, and TQ908G. Each model in this family shares a robust strain-gauge sensing element but differs in how it handles signal transmission and in its mechanical coupling design:
TQ908A / TQ908B / TQ908C: These models are non-contact rotary torque sensors that use a strain gauge bridge with a non-contact signal transmission (no slip rings, which eliminates wear and noise). They have keyed shaft ends for coupling into a rotating shaft line. TQ908A covers a wide low-to-mid range (measuring ranges from ~0.1 N·m up to 500 N·m), whereas TQ908B is focused on mid-range (around 5 N·m to 500 N·m), and TQ908C is specialized for very small torques (0.1 N·m up to 5 N·m, making it a micro rotating torque sensor). All three are compact and easy to install in a drive line. They provide a raw mV/V output proportional to torque, requiring external amplification. Key performance: about ±0.2% FS non-linearity, ±0.1–0.2% repeatability, and they can rotate at speeds up to 4000 RPM continuously. These are ideal for robotic joint motors or small motor test benches where you need to measure dynamic torque during rotation without adding significant inertia or drag.
TQ908F: This model is a high-speed, non-contact rotary torque sensor with an integrated signal conditioner. It can output a frequency signal (5–15 kHz) proportional to torque, as well as analog outputs like 4–20 mA or 0–10 V (selectable). The TQ908F is designed for long-distance signal transmission and strong noise immunity, which is beneficial in factory environments. It is wear-free (no contact rings) and supports very high rotation speeds – up to 8000 RPM continuous (and even 15,000 RPM for lower torque ranges). The torque capacity is broad (covering roughly 5 N·m to 5000 N·m in various versions). Despite the added electronics, it maintains high accuracy (±0.2% FS typical) and stability. TQ908F is well-suited for high-speed motor and gearbox testing, such as in servo motor dynamometers or automotive component testing, where you want a direct electrical output from the sensor to feed into a data acquisition system or controller.
TQ908D: This is a high-capacity dynamic torque sensor that uses a slip-ring assembly to carry the strain gauge signal from the rotating shaft to the stationary side. It is built for measuring large torques (nominal ranges from 200 N·m up to 2000 N·m) but at relatively low rotational speeds (up to about 100 RPM maximum). Because of the slip ring design, it is intended for applications like slow-speed rotation or indexing systems, or even quasi-static measurements where a small rotation is acceptable. The slip ring allows it to measure continuous bidirectional torque, including static torque, but introduces a slight mechanical wear factor (though engineered for long life at low RPM). TQ908D’s accuracy is around ±0.2% FS, and it shares the robust build of the series (IP66 protected, high overload tolerance of 150%/200%). This sensor might be used in industrial robot base joints, winders, or test stands for high-torque actuators where full rotations are limited and high torque must be captured.
TQ908G: This model is a medium-to-high capacity rotary torque transducer that uses a slip ring for power and signal, similar to TQ908D, but is optimized for somewhat higher speed operation (up to ~1800 RPM). It covers torque ranges roughly from 5 N·m to 1000 N·m. TQ908G provides strain gauge outputs (with a sensitivity ~1.5 mV/V) and requires external excitation (around 9–15 V DC for the bridge). It stands out by offering an IP67 protection rating – it’s very well sealed against contamination – and by having a good accuracy class (non-linearity can be as low as ±0.1% FS on certain ranges). The slip ring in TQ908G is a high-quality design that allows reliable transmission at moderate speeds without significant signal noise. This sensor is a great choice for robotic test platforms or automated assembly machines where you need to measure torque on a rotating element (like an end-effector spinning or a rotary indexing table) with high precision, and environmental conditions may be harsh (dust, oil, etc.). Its ability to measure both clockwise and counter-clockwise torque (bidirectional) with equal accuracy is useful for systems that apply and release torque cyclically.
The following table highlights key specifications of the TQ908 dynamic torque sensor series:
| Model | Dynamic Torque Range | Max Speed | Output Signal | Accuracy | Notable Features |
| TQ908A | 0.1 N·m up to ~500 N·m (various ranges) | 4000 RPM | mV/V (strain gauge bridge) | ±0.2% FS (typical) | Non-contact transmission (no slip rings); keyway shaft connections; broad range, high precision for motors & actuators. |
| TQ908B | 5 N·m to ~500 N·m | 4000 RPM | mV/V (strain gauge bridge) | ±0.2% FS | Similar to TQ908A (non-contact), but starting at slightly higher torque; compact and rugged for industrial use. |
| TQ908C | 0.1 N·m to ~5 N·m (micro torque) | 4000 RPM | mV/V (strain gauge bridge) | ±0.2% FS | Smallest range rotary sensor; ideal for micro-motors and small gear torque; very compact size. |
| TQ908F | ~5 N·m to 5000 N·m | 8000 RPM (15k RPM for low range) | Frequency 5–15 kHz, 4–20 mA, 0–10 V (built-in amplifier) | ±0.2% FS or ±0.5% FS (option) | Non-contact, no wear; long-distance signal transmission; high-speed capable; internal electronics for direct analog/frequency output. |
| TQ908D | 200 N·m to 2000 N·m | 100 RPM | mV/V via slip ring | ±0.2% FS | Slip-ring sensor for high torque at low rotation; handles continuous and static torque; very high capacity. |
| TQ908G | 5 N·m to 1000 N·m | 1800 RPM | mV/V via slip ring | ±0.1% to ±0.3% FS (range-dependent) | Slip-ring transmission with IP67 sealing; measures torque at moderate speeds; high accuracy in mid-to-high range torque. |
Table: Dynamic (Rotary) Torque Sensor specifications (TQ908 series). Non-contact models (A, B, C, F) use wireless or transformer coupling, whereas D and G use high-grade slip rings for signal transfer.
All TQ908 series sensors are designed with strong anti-interference and stability in mind. For example, TQ908F’s frequency output is particularly immune to noise over long cable runs, which is beneficial in factory settings with lots of electrical noise. The non-contact models (A, B, C) eliminate the worry of electrical noise from contacts and can run indefinitely without maintenance; they are effectively wear-free, only requiring that bearings or coupling alignment are properly managed in the mechanical setup.
Repeatability and resolution: The dynamic sensors have repeatability on the order of 0.05% to 0.1% FS for most models (as indicated by their very low hysteresis and non-repeatability errors). This means in a test scenario, you can expect highly consistent readings for the same torque across multiple runs. The resolution is largely dependent on the data acquisition system – but since these sensors often output in analog (voltage or frequency), they can be paired with high-resolution counters or ADCs to capture fine torque fluctuations. For instance, TQ908F’s frequency output can be measured to a small fraction of its full-scale frequency span (which is 10 kHz ± some range), translating to fine torque increments detection, suitable for dynamic torque ripple analysis in motor drives.
Overload and durability: Dynamic torque sensors must endure not just static overloads but sometimes shock torques. The TQ908 series has at least 150% FS safe overload and 200% FS ultimate, meaning they can tolerate occasional spikes (like a sudden motor stall) without damage. Additionally, their construction (using high-strength steel for shafts and robust supporting bearings) ensures they maintain calibration over many cycles of use. The IP ratings (IP66/IP67 for many) mean they’re protected from dust and coolant splash, which is important when installing on robot gearboxes or in motor test cells.
Integration: These sensors include features to simplify integration: mounting flanges or keyways on shafts, optional foot mounts for the sensor body (to prevent it from rotating when used as reaction units), and standard connector outputs. Communication interface flexibility is a hallmark of the TQ908 family: one can choose the raw signal versions for direct integration with custom electronics (for fastest response in control loops), or choose models like TQ908F or add external amplifier modules for industry-standard outputs (useful to connect to PLC analog inputs or high-level controllers). This means robotics engineers can use the same sensor model in a development environment with high-end instrumentation, and later in the field with a simpler PLC, by adjusting the output module.
Conclusion
In summary, Pacific International Bearing Sales provides a comprehensive portfolio of torque sensors tailored to robotic applications – from robot joint torque sensors that enable safe and responsive collaborative robots, to micro torque sensors for fine assembly and testing, to static reaction sensors for calibration and process control, and dynamic rotary sensors for monitoring rotating machinery. All these sensors are engineered for high precision, featuring excellent resolution, low drift, and high repeatability, which give robotics engineers the reliable data needed for advanced control algorithms and quality assurance. They are built with ruggedness in mind – sporting features like overload protection and IP-rated enclosures – to ensure longevity and consistent performance in industrial settings.By selecting the appropriate torque sensor type (joint, micro, static, or dynamic) and model (from TQF209H to TQ908G and everything in between), robotics professionals can equip their systems with accurate torque feedback. This leads to benefits such as improved force control, predictive maintenance (through torque monitoring), enhanced safety (detecting overload or collisions), and overall better performance of robotic operations. PIB’s technical support can further assist in pairing these sensors with suitable amplifiers, readouts, or communication interfaces (analog, frequency, or digital) to integrate into any robotic control architecture seamlessly. With high precision torque sensing from PIB, robotic applications can achieve new levels of precision, safety, and efficiency in their operations. Contact us at [email protected]